V
主页
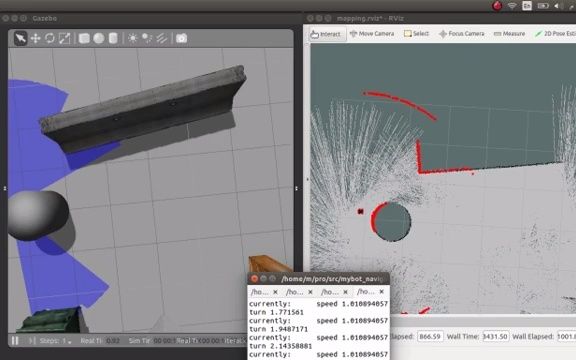
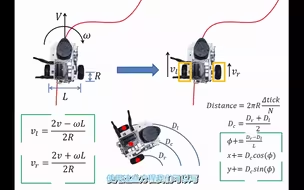
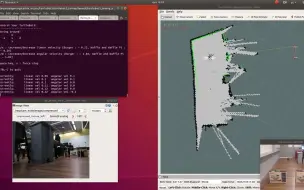
使用 ROS + Arduino + LIDAR 的 SLAM 自主机器人
发布人
网络
打开封面
下载高清视频
观看高清视频
视频下载器
物理搬运机器人 靶心识别
快速流畅!人工智能ROS小车雷达导航、路径规划、虚拟仿真、slam导航算法
(开源)最迷你的ROS2 机器人,自动路径规划、视觉识别、人体检测跟随、手势识别控制、多形态切换(想要资料评论区留言安排!)
(开源)哪吒 MiniROS 机器人结构安装视频(ROS2)
移动自主机器人中的传感器融合| IMU+车轮里程计
ROS SLAM小车
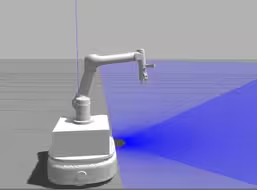
移动机械臂抓取
灵光Lixel采集指南 | 初始化启动篇
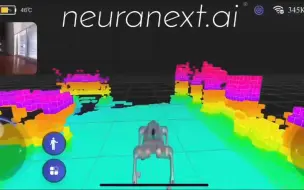
宇树Go2 Pro 机器狗正在绘制其环境地图 | Unitree 4D 激光雷达 #机器人视觉
slam手持三维激光扫描仪,古建筑数字化保护,建筑立面快速测量#建筑测量#slam三维扫描仪#手持激光雷达
具有 ROS 和 Gazebo 的四轮机器人,用于 SLAM 和导航
TC-LIOM:Tightly-coupled Lidar Inertial Odometry and Mapping(Demo 02)
使用 Gazebo、Rviz、Hector SLAM 和 Octomap 在 ROS 中进行无人机自主导航、2D 和 3D 映射
使用 Arduino 控制步进电机 - 教程
使用 ROS Moveit 和 Arduino 对机器人机械手进行逆运动学和轨迹执行。
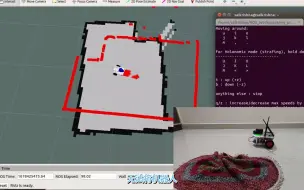
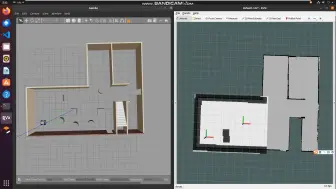
基于ROS的Ubuntu(20.04版本)环境下的自主导航的简单演示
使用ROS的自主导航移动机器人 | 激光雷达 | 差动驱动运动学
机械臂协调控制复现
FR3仿真机+真机MoveIt路径规划 阿凯法奥ROS包(akai-fr-ros)
写ROS大作业,但是调车
最后还是用amcl定位才连续成功导航了三次
全轮ROS gazebo机器人
SLAM - 创建地图和自主导航演示
RTK履带无人车户外曲线路径跟踪(精度3cm内)
如何使用 Arduino 和 MPU6050 陀螺仪和加速度计传感器测量角度
ROS MoveIt规划场景中添加虚拟墙
SLAM算法(浙软夏令营)废柴大学生的所作所为
手持slam简单汇总
使用 ROS 在 Gazebo 中模拟抓取机器人
基于ROS的多车道道路环境下的车距保持与自主变道与超车
复杂环境下3D激光SLAM系统研究
[RA-L2023] CamMap:基于SLAM地图对齐方式的非重叠视场相机的外参标定
#三维激光扫描#SLAM移动三维激光扫描仪#手持激光雷达,古镇三维数字化保护
在 ROS 和 Gazebo 中使用激光雷达和 RGBD 相机的 RTAB-Map SLAM
[IROS2024] I2EKF-LO:A Dual-Iteration Extended Kalman Filter Based LiDAR Odometry
ros如何在避开障碍物的同时进行导航
手眼臂合一!亚博智能&大象机器人联手打造,7自由度AI视觉协作机械臂!
基于B样条和改进A*的避障
真正可用!灵光Lixel的实时点云有多靠谱?|手持激光雷达手持slam
【雷达-相机协同定位】LiDAR-Vision Tightly Coupled Collaborative Positioning