V
主页
波士顿动力机器狗研发、测试流程
发布人
https://www.youtube.com/watch?v=_Ux-N-NK2GM Spot 在现实世界中的部署比任何其他步行机器人都多。 但是如何才能制造出一个能正常工作的机器人呢? 看看我们的可靠性实验室,了解我们如何测试 Spot 的功能、耐用性、耐用性等。 我们将 Spot 推向极限,以便您可以不受限制地实现自动化。
打开封面
下载高清视频
观看高清视频
视频下载器
真牛!这个人形机器人吊打很多厂家的“产品”
人形机器人足底机械结构设计
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
00:00 9 款即将在生活工作中见到人形机器人
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
通过优化理论指导设计双足以达到控制和任务的最优
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
NASA’s first humanoid robot Valkyrie is being tested in Australia
An Efficient and Versatile Framework for Multi-Contact Optimal Control
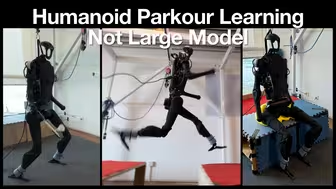
我们的人形机器人不愿意使用大模型去思考。但是它很爱玩耍。[humanoid parkour learning]
四足机器人沙滩行走
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
MPC and RL, two different roads to legged locomotion, and that's OK
波士顿动力机器人 Atlas | 真正继承者 Nadia | 其他机器人靠边站
这下真狗了 Boston Dynamics
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
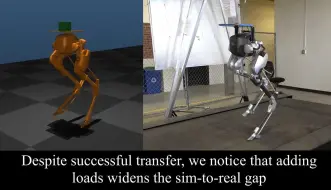
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
MuJoCo 仿真 案例欣赏
Go2使用教学04-标定教程
Go2使用教学05-运动姿态介绍
Model and data, two essential ingredients for controlling legged robot
Agility 搬箱子卸货
Go2使用教学13-牵引步态
8分钟内了解波士顿动力机器人30年的整个演变
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
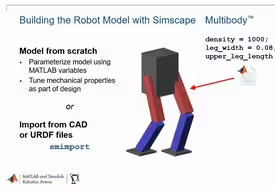
双足机器人的建模与仿真 MATLAB and Simulink
Go2开发教学04-高层运动服务接口
(Humanoids 22)半人马机器人爬上 0.3 m 的平台,手臂上承载 17 kg 的有效负载
宇树人形机器人实现超省电的直膝行走
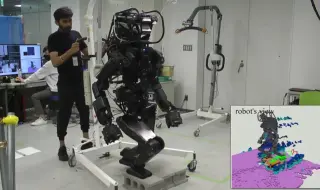
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
适用于人形和四足的仿真器 The Simple Simulator 最新成果 去简介github 地址试用下吧
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
Humanoid robot research result highlights in 2022- CNRS-AIST JRL
机器人遛机器狗~机器狗要攻击机器人啦~机器人走进现实,以后能帮你洗衣做饭带娃,要是能帮我赚钱就更好了[呲牙]
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
(Humanoids 2022)Continuous Jumping of RAMIEL Using Reinforcement Learning
宇树Go2—常规模式
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
BRUCE Got Spot-ted at ICRA2024(标题谐音梗不翻译了各位自行体会)
移动机械臂让土木工程焕发第二春