V
主页
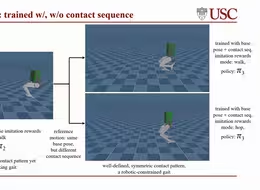
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
发布人
https://www.youtube.com/watch?v=IeSUM_ej8wE Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads Jeremy Dao, Kevin Green, Helei Duan, Alan Fern, Jonathan Hurst Recent work on sim-to-real learning for bipedal locomotion has demonstrated new levels of robustness and agility over a variety of terrains. However, that work, and most prior bipedal locomotion work, have not considered locomotion under a variety of external loads that can significantly influence the overall system dynamics. In many applications, robots will need to maintain robust locomotion under a wide range of potential dynamic loads, such as pulling a cart or carrying a large container of sloshing liquid, ideally without requiring additional load-sensing capabilities. In this work, we explore the capabilities of reinforcement learning (RL) and sim-to-real transfer for bipedal locomotion under dynamic loads using only proprioceptive feedback. We show that prior RL policies trained for unloaded locomotion fail for some loads and that simply training in the context of loads is enough to result in successful and improved policies. We also compare training specialized policies for each load versus a single policy for all considered loads and analyze how the resulting gaits change to accommodate different loads. Finally, we demonstrate sim-to-real transfer, which is successful but shows a wider sim-to-real gap than prior unloaded work, which points to interesting future research. paper link: https://arxiv.org/abs/2204.04340
打开封面
下载高清视频
观看高清视频
视频下载器
真牛!这个人形机器人吊打很多厂家的“产品”
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
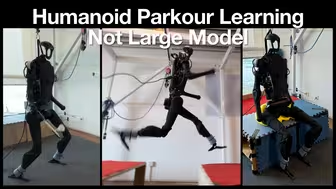
我们的人形机器人不愿意使用大模型去思考。但是它很爱玩耍。[humanoid parkour learning]
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
人形机器人足底机械结构设计
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
Online trajectory optimization for dynamic aerial motions of a quadruped robot
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
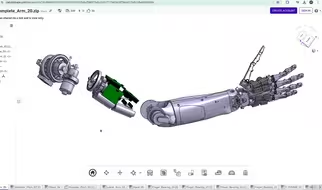
人形机器人灵巧手臂最新成果
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
幽灵机器人 Ghost Robotics - Vision 60
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
人形机器人 手指机械结构
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
通过优化理论指导设计双足以达到控制和任务的最优
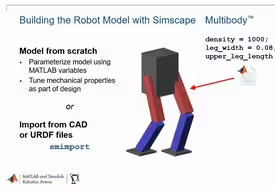
双足机器人的建模与仿真 MATLAB and Simulink
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
(Humanoids 22)半人马机器人爬上 0.3 m 的平台,手臂上承载 17 kg 的有效负载
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
搭载华为盘古大模型的乐聚夸父机器人,是真能做家务
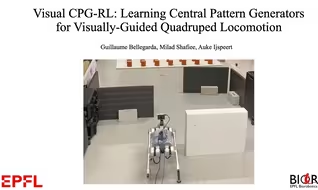
Visual CPG-RL: Learning Central Pattern Generators for Visually-Guided Quadruped
波士顿动力也上强化学习了,很强!Reinforcement Learning with Spot _ Boston Dynamics
Event Camera Visual Odometry for Dynamic Motion Tracking of a Legged Robot
MuJoCo 仿真 案例欣赏
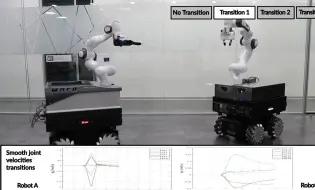
A Distributed Processing Approach for Smooth Task Transitioning in SHC
Bipedal Safe Navigation over Uncertain Rough Terrain
Model and data, two essential ingredients for controlling legged robot
强推!上海交大、腾讯、中国科学院三方强强联合的【python+机器学习+深度学习】系列课程,堪称人工智能系列课程的巅峰之作!-人工智能/深度学习/机器学习
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
2024全球十大人形机器人:中国机器人强势崛起!
宁波企业自主研发人形机器人“贾维斯”,拥有44个关节,其中70%零部件由宁波本土企业生产!
宇树B2倒立行走
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
第一个自主走上街头的人形机器人 傅利叶推出端到端纯视觉解决方案的机器人
基于国产银河大模型驱动的盖博特机器人来了#人工智能 #AI #大模型 #机器人
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
(ICRA 2024)Contrastive Initial State Buffer for Reinforcement Learning
秒杀波士顿动力Atlas机器人 清华叉院训练强化学习策略,小成本让H1人形机器人完成跑酷高难度动作
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid