V
主页
3D测量软件简介系列-MeshRoom(开源)
发布人
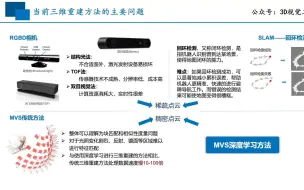
Meshroom是一种基于传统开源摄影测量计算机视觉框架AliceVision的三维重建软件!相比较目前深度学习方法,几何方法精度会更高一点,但是需要拍摄大量照片,另外,传统的方法计算量也是很大一个问题,根本无法达到实时性!正因为这个缺点,目前学术界正尝试着追求用深度学习来完成计算机对世界的3D感知功能,目前看来,俨然已经取得卓越的成绩!也许下个十年,你可以看到基于深度学习并且能够实时进行建模的3D测量软件!让我们拭目以待3D视觉领域的的进展!
打开封面
下载高清视频
观看高清视频
视频下载器
RealityCapture1.4-如何使用控制点
Open3D与点云处理简介(公开课)
RealityCapture1.4-摄影测量融合三维激光扫描
四旋翼模型与控制基础
四旋翼模型简介-御风250模型
RealityCapture1.4-缓存与重置
快速掌握SpeedTree10的几个新功能
高速结构光三维面形测量方法
光学3D测量技术原理及应用
四旋翼无人机-遥控器简介
CVPR23开源 超越LoFTR!大尺度变化下的特征匹配!
Occupancy Networks后处理
CVPR2024开源NetTrack:跟踪高动态物体!
Occupancy占用网络的多维应用探究
零基础入门四旋翼建模与控制无人机 | 数学模型
CVPR'24开源 通过3D GS进行整体城市3D场景理解!
PID控制器原理讲解
四旋翼无人机-PX4控制算法代码
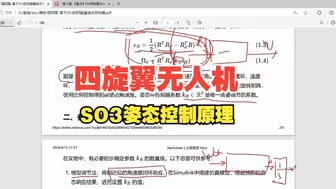
四旋翼无人机-SO3姿态控制原理
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
清华最新开源万能3D分割一切!
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
这绝对是质量最高的单目深度估计开源方案!
LVI-SAM代码实战与评估
RealityCapture 1.4-如何完全重建一个物体
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
三维点云系列视频——第一章绪论
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
Occupancy的工程细节
相机标定的基本原理与经验分享
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
绪论|单目相机标定理论及张正友标定法(上篇)
多视图几何MVS简介及MVSNet如何高效入门?
点云3D深度学习模型与实践
深度相机概述
传感器与遥控器校准原理
LVI-SAM|视觉-惯性子系统(VIS)代码精读
零基础入门四旋翼建模与控制无人机 | 四旋翼PID控制
零基础入门四旋翼建模与控制无人机 | 基础知识
基于单张图片的3D人脸重建概述