V
主页
魔法降临 | Carla中的交通流是个啥?
发布人
视频出自自动驾驶之心平台《Carla-Autoware联合仿真实战》:https://wrzpl.xetslk.com/s/1mVJYs
打开封面
下载高清视频
观看高清视频
视频下载器
端到端趋势下,传统规控还有未来么?
轨迹预测到底预测个啥???轨迹预测入门必备!
落地之殇 | 联合预测是端到端正确的道路么?
斯坦福李飞飞终于把【计算机视觉】给讲明白了!全程16集,草履虫都能听明白!深度学习cs231n公开课【中英字幕】
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
吹爆!目前B站讲的最透彻的MATLAB教程全套完整版,包含所有干货内容。强烈建议收藏
BEVCar:SOTA!RV融合完成地图和分割双任务
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
Hydra MDP | 英伟达如何理解端到端自动驾驶?
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
特斯拉的World Model是什么?怎么做端到端训练?
什么是端到端自动驾驶?什么是基础world model?
端到端算法有哪些优势?完爆传统感知规控?
面向下一代自动驾驶:全栈里程碑综述汇总
地平线VAD又又又上新了!VADv2比v1强在哪里?一起来听
自动驾驶规划控制的未来是什么?
聊一聊4D成像雷达在辅助驾驶领域的应用
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
Tesla惊艳的防碰撞机制是如何实现的?TESLA Occupancy Networks:Don’t Crash, EVER!!
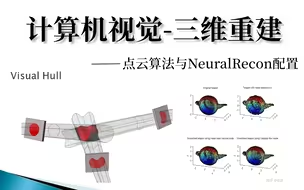
【三维重建完全可自学教程】2024B站最完整的计算机视觉-3D三维重建教程分享!知名博士通俗易懂的解释,学三维重建真的不难!
多障碍物联合预测!理论全搞定~
端到端基础!绕不开的感知模块
这才是科研人该学的!一口气学完自动驾驶八大算法-环境感知、目标检测、语义分割、强化学习、决策与控制算法!原理到实战,太通俗易懂了!机器学习|深度学习|计算机视觉
透彻!特斯拉occupancy network详解
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
我愿称之为强化学习天花板课程!台大李宏毅教授亲授强化学习教程,究极通俗易懂!建议收藏!
特斯拉的4D自动标注详解!为什么无标注数据work?
自动驾驶仿真框架CARLA教程(6):Longer-term model results
Segment Anything之后,分割的路在何方?
【IROS2022】Voxfield:用于在线规划和三维重建的非投影符号距离场
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
我愿称李宏毅强化学习为天花板课程!简单易懂!清晰明了的 PPO算法强化学习入门教程!深度强化学习、人工智能、神经网络
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
学完即可就业!一口气刷完3D点云、车道线检测、轨迹预测、三维重建、环境感知、深度估计、关键点特征匹配、行人重识别等八大自动驾驶算法与实战!真的比刷剧还爽!
搞懂了!原来激光雷达和相机的内外参是这样标定的
【200集付费】一口气学完回归算法、聚类算法、决策树、随机森林、神经网络、贝叶斯算法、支持向量机、神经网络等十二大机器学习算法!
大火的BEVFusion算法详解
在线高精地图与城市NOA是什么关系?为什么如此重要?