V
主页
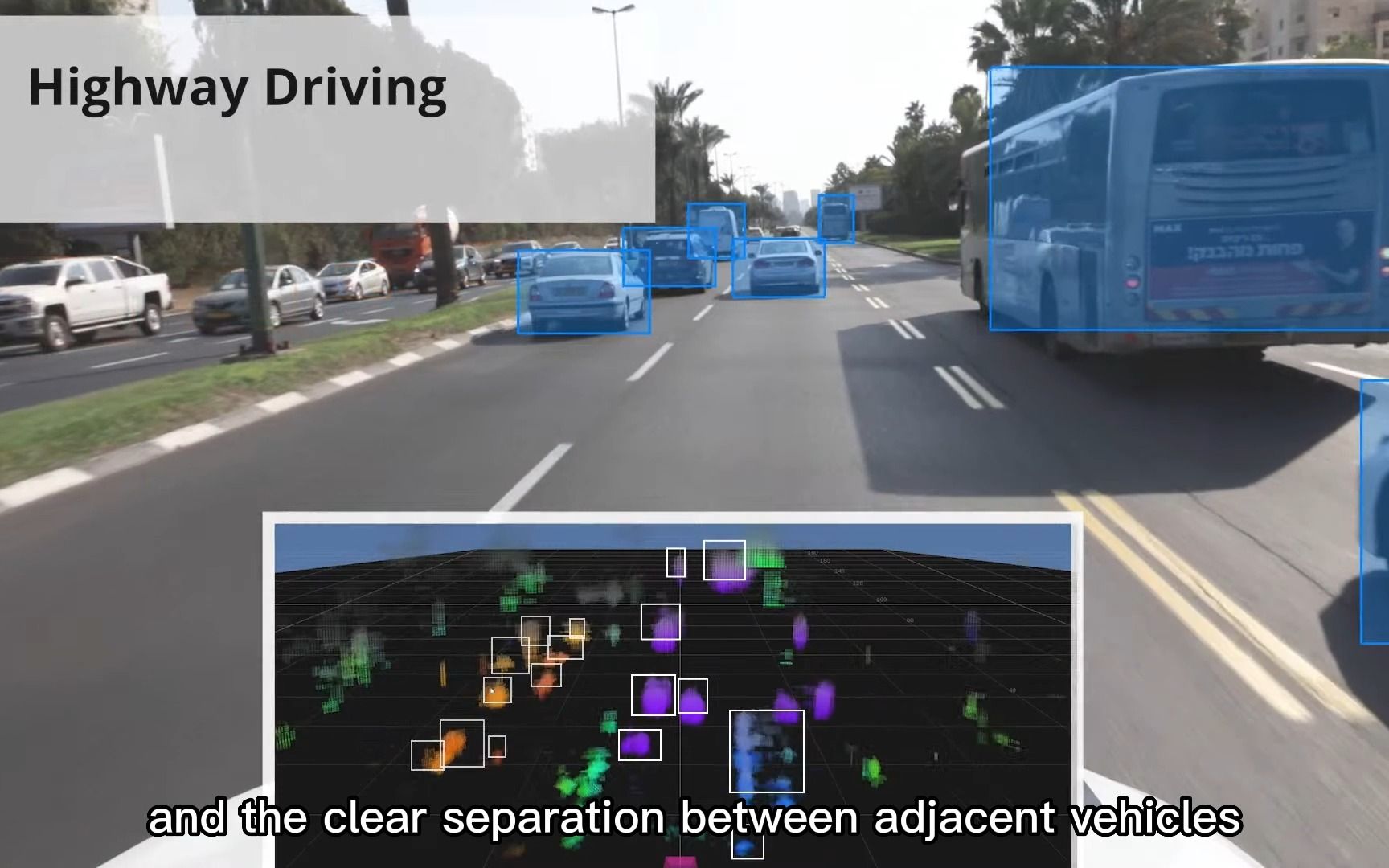
聊一聊4D成像雷达在辅助驾驶领域的应用
发布人
视频链接:https://www.youtube.com/watch?v=EKjAxve9XgQ&t=108s
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
什么是端到端自动驾驶?什么是基础world model?
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
用于激光雷达视图合成和三维重建的瞬态神经辐射场
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
闭环驾驶SOTA!CarLLaVA: CARLA自动驾驶挑战赛2.0第一名方案!
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
恶劣天气可拿捏不了我的鲁棒性!AAAI大佬来助攻
使用概率深度补全的3D激光雷达重建(IROS2022)
LLM+自动驾驶还有什么搞头?LLM驱动的智能体应用探析!
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
相机和激光雷达融合的多车辆跟踪demo
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
Nerf+SLAM会擦出什么样的火花?
支持在线时空标定!高效多传感器辅助惯性导航系统(ICRA2021)
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
83FPS,史上最快 | IA-SSD: 基于point方式的高效激光雷达点云3D目标检测网络(CVPR2022)
自动驾驶仿真大观:聊聊仿真的研究背景
端到端数据格式是什么样的?快来看看吧
具身智能机械狗!OpenDog V3:开源四足机器人项目
GPT-4V与自动驾驶更配?GPT-4V在自动驾驶中的早期探索!
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
激光雷达3D目标检测算法有哪些?怎么分类的?
突破次元壁!4D Gaussian Splatting来袭
元戎启行联手腾讯地图宣布2024年智能驾驶汽车发布合作
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
南洋理工大学博士分享!规模化可学习与交互式的自动驾驶决策系统如何构建?
ICLR'24无图新思路!LaneSegNet:基于车道分段感知的地图学习(实时推理+三项SOTA)
端到端自动驾驶:SparseDrive 算法详解
自动驾驶面试一百问!秋招社招全搞定
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
为自动驾驶构建城市规模的神经辐射场
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
RangeDet:基于Range-View的激光雷达3D目标检测网络(ICCV2021)
英伟达最新!Cube-LLM:通过视觉语言模型,真正感知3D世界