V
主页
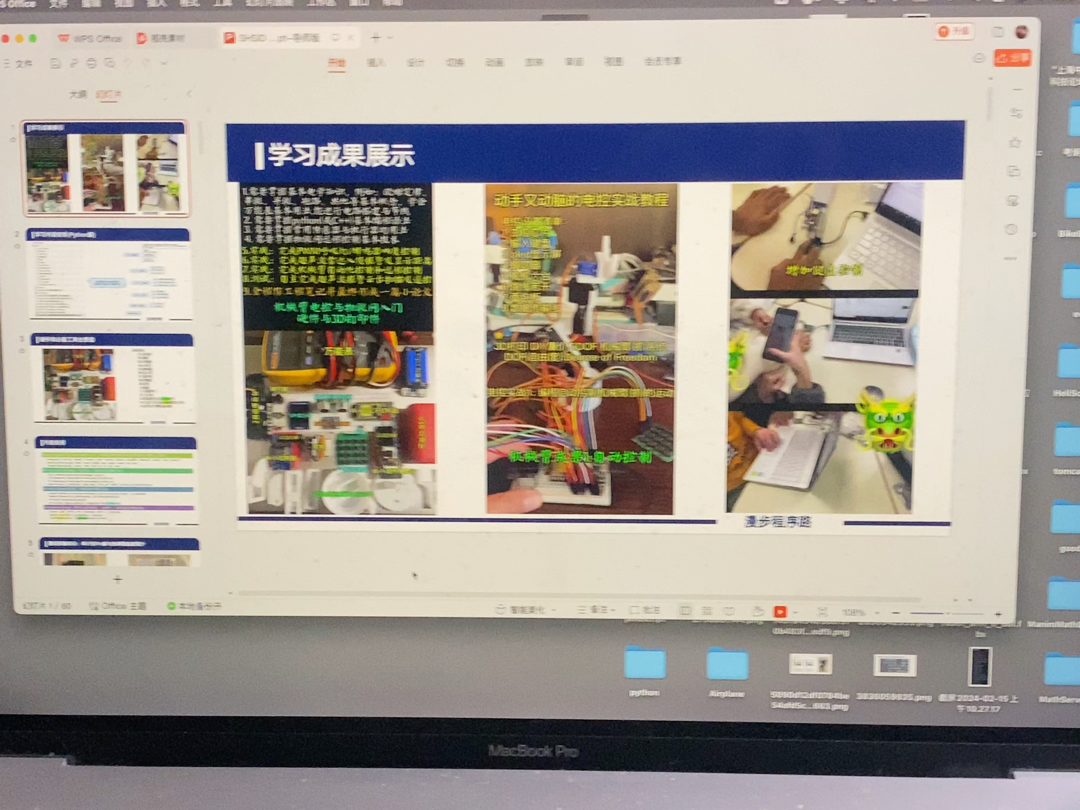
开启PBL编程之旅!使用ESP32芯片通过Micropython编程语言来体验与掌握WiFi远程控制基于舵机的机器人装置(云台、机械臂、双足、四足等)
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
乐高EV3 F1赛车Python编程(1):设备简介
几年前弄的otto小机器人,从arduino nano版改成esp32版,支持远程控制以及siri语音控制
1..Python manim 数学动画引擎之尺规定性作图与代数定量作图篇2.两小时学会制作交互式电子笔记 3.英汉双解Python入门(基础语法篇)
手机远程控制Pan-Tilt 云台并实时接收和显示ESP32-CAM图传数据(视频)
2.通过内置(built-in)数学函数中的几种浮点数(float,既小数)转整数(integer)的应用来了解和掌握“函数调用( invocation)”语法
5.变量类型的四条核心规则,与前面的四条变量命名规则组成了变量名、值与类型的核心编程语法基本规则,这8条规则适用所有编程语言,编程的语法要点
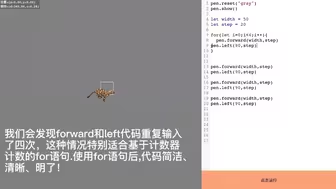
1.编程语言语法的宏观体系结构,既要学哪些东西?我们先从上到下的俯视整体结构,再从下向上一一掌握,你会发现就是初中数学表达式语句再加条件与循环流程控制语句而已!
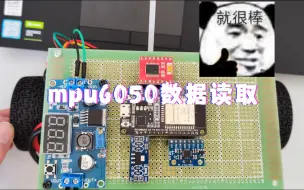
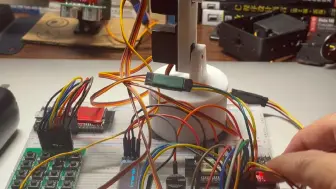
ESP32平衡小车-mpu6050数据读取(arduino IDE)
男人致死是少年,每个少年都有一个挖掘机(digger)梦,挖掘机DIY太难了,还是做了五自由度(5 DOF)机械臂(Robot Arm)吧
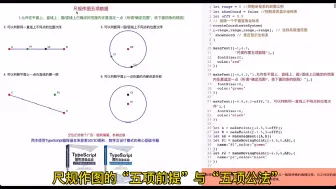
玩玩几何编程作图游戏
在NodeMCU-32S上实现DIY 6自由度机械抓的3D虚拟仿真程序
齐护SMALL系列ESP32开发板 智能手表 AI语音大模型应用 创客小车 Arduino Micropython图形化编程学习套件
Manim数学引擎几何作图入门Demo集展示
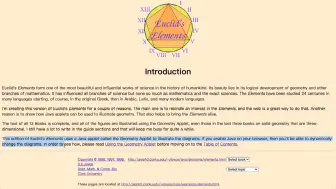
读原版《几何原本》:1.介绍以及13卷内容概述
经典的CS架构:ESP32-CAM作为图传服务器(Server),ESP32作为客户端(Client)图传显示接收器
飞神八车坦克猎豹阿童木如转向不足,可调接舵机保护改善【调节舵机保护】
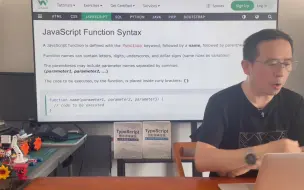
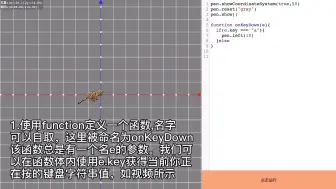
8.详解js函数定义与函数调用的语法格式(使用原版开源教程,链接地址请参考评论区,可直接在教程网页中编写、调试与运行代码)
使用ESP32 WiFi芯片通过编程方式远程控制六自由度3D打印机械爪:从自娱自乐自High到成为一门CS-PBL课程的演绎过程
就算是运行正确的五自由度机械臂Demo吧!哎,其实还是有点问题的
手把手教程!!!ESP32使用esp-now遥控点亮一盏LED
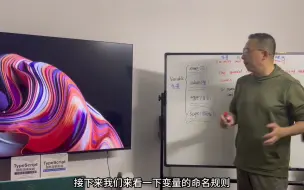
4.变量命名的4条核心规则,适合基本所有编程语言,具有普遍特性.中英双语,可以背诵一下,全都学了。现如今时代变了,需要学科融合,学以致用,强调理工优先,综合素养
这机械臂采用两块ESP32芯片使用UDP协议进行数据传输与控制,还可以改成TCP、HTTP、Websocket以及Mqtt或蓝牙等协议
k210 AI芯片的功能测试,包括语音识别、拍照/视频储备储备与播放、基于舵机云台的人脸追踪、以及图形与游戏性能测试(使用最爱的魂斗罗、松鼠大作战及赤色要塞)
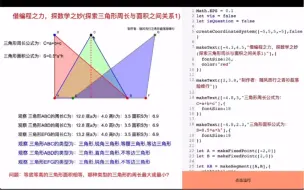
使用编程工具来探究平面几何及初等函数(依赖心情、时间及能力制作中文/英文/混合版)
端午感悟一下读书心得(端午节的快乐:20年前购入的3D数学基础-图形和游戏开发和游戏开发物理学这两本书,今天端午节配齐这两本书的第二版,人生能有几个20年!)
构建配置完成webvr和unity3d vr开发环境,成功的运行在吃灰了半年的pico4上
抽风的机械臂配上土味英文解说也算绝配了!(make it clear、catch what you said、make me understood 是英语的核心
4.一部提供情绪价值与成就感的Unity 3D 引擎零基础实战入门教程
ESP32将MPU6050陀螺仪姿态数据(四元数或欧拉角)通过websocket协议传输给Three.js引擎进行飞机姿态Yaw-Pitch-Roll响应绘制
JavaScript语言编程基础概念演示(上)
JavaScript语言编程基础概念演示(下)
2023年第一个作品:拼乐高EV3版F1赛车,两个大电机做后驱,一个中型电机控制前轮转向,非常帅!
esp32语音助手,AI早教机器人
爆肝一周,用123D建模做了个机械臂,拓竹A1没翻车
7.定义并实现一个函数并将该函数的图像可视化绘制出来(了解函数的定义及三种调用:包括调用自定义函数、调用非自定函数以及回调函数)
ESP -AI 硬件接入AI的解决方案,支持插件开发啦!海豚配音插件演示
使用乐高EV3组装一辆皮带转动转向三轮车,本视频展示了车体三个部分的拆解与组装过程
(飞行视频+飞行事故)全副武装MJ-65HV舵机 最后几秒的预言家
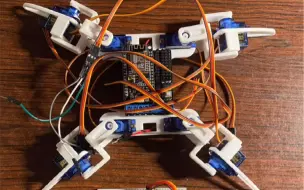
调试四足八自由度蜘蛛机器人,完成第一个姿态:标准站立!骨骼动画第一帧,叫绑定姿态“bind pose”,所有其它姿态都是绑定姿态的偏移数据
10. 函数定义时return关键字的用法