V
主页
(RA-L 23)动态环境中自主避碰的安全感知
发布人
https://www.youtube.com/watch?v=UwwFhpAp13M&t=1s Safety-Aware Perception for Autonomous Collision Avoidance in Dynamic Environments Abstract: Autonomous collision avoidance requires accurate environmental perception; however, flight systems often possess limited sensing capabilities with field-of-view (FOV) restrictions. To navigate this challenge, we present a safety-aware approach for online determination of the optimal sensor-pointing direction psi_d which utilizes control barrier functions (CBFs). First, we generate a spatial density function Phi which leverages CBF constraints to map the collision risk of all local coordinates. Then, we convolve Phi with an attitude-dependent sensor FOV quality function to produce the objective function Gamma which quantifies the total observed risk for a given pointing direction. Finally, by finding the global optimizer for Gamma, we identify the value of psi_d which maximizes the perception of risk within the FOV. We incorporate psi_d into a safety-critical flight architecture and conduct a numerical analysis using multiple simulated mission profiles. Our algorithm achieves a success rate of 88-96%, constituting a 16-29% improvement compared to the best heuristic methods. We demonstrate the functionality of our approach via a flight demonstration using the Crazyflie 2.1 micro-quadrotor. Without a priori obstacle knowledge, the quadrotor follows a dynamic flight path while simultaneously calculating and tracking psi_d to perceive and avoid two static obstacles with an average computation time of 371 us. https://ieeexplore.ieee.org/abstract/document/10272635
打开封面
下载高清视频
观看高清视频
视频下载器
(RA-L) )Safe Control for Navigation in Cluttered Space using Multiple CBF
有开源github代码! RA-L论文 人形机器人的多接触全身控制
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
人形机器人足底机械结构设计
机械臂 底盘 轨迹跟踪 移动机械臂轨迹跟踪 移动机械臂协同避障
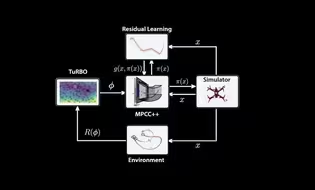
(RSS'24) MPCC++:具有安全约束的时间最优飞行的模型预测轮廓控制
人形机器人 手指机械结构
通过优化理论指导设计双足以达到控制和任务的最优
C6-2智能车的建图与自主实现教程
UCL 论文 DiPPeST:基于扩散的路径规划器,用于四足机器人的轨迹合成
[RA-L 2020] Object Recognition, Contact Simulation, Detection, and Control
双足机器人步态生成 MATLAB and Simulink
Consensus Complementarity Control for Multi-Contact MPC
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
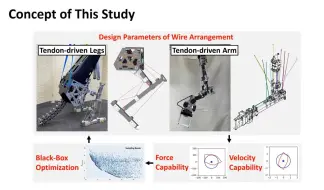
(RA-L 2024) Design Optimization of Wire Arrangement for Tendon-driven Robots
MPC and RL, two different roads to legged locomotion, and that's OK
Fatrop 求解器 完胜 IPOPT
(RA-L 23) Reactive Landing Controller for Quadruped Robots
NTU开源 | AirSLAM:高效且 光照稳健的点线视觉SLAM系统 嵌入式运行速度可达40HZ
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
[竞赛直击]中国机器人及人工智能微型无人机-国一客户案例-Phoenix330
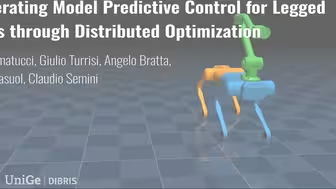
[IROS 2024] 通过分布式优化加速腿式机器人的模型预测控制
给循迹优化了一下,添加一点难度!
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
人形机器人灵巧手臂最新成果
Multi-robot Task Allocation and Path Planning with Maximum Range Constraints
真牛!这个人形机器人吊打很多厂家的“产品”
MuJoCo 仿真 案例欣赏
动态变化环境中单足跳跃者的模型预测跑酷控制 代码地址在简介
Panoptic-SLAM:使用全景分割的动态环境中的视觉 SLAM 代码已开源
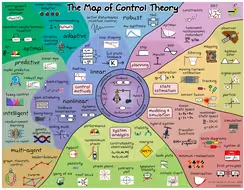
控制理论学习路线图
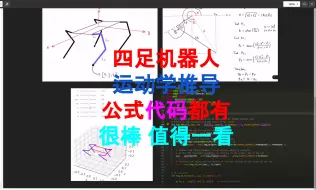
Part 2 - How to Solve Inverse Kinematics of a 4 Leg Robot
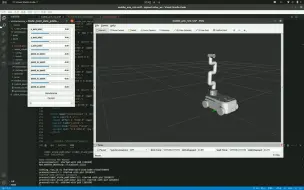
移动机械臂运动学仿真 ROS+rviz (地盘是全向车,简化为4个普通轮)
基于stm32的四驱智能小车遥控寻迹避障(源码+原理图)
(ICRA 2024) Actor-Critic Model Predictive Control
人形机器人腿部结构 基于 4DoF 球面并联机构
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
[ IROS 24 ] DIABLO:完全由直接驱动关节组成的 6 自由度轮式双足机器人