V
主页
CVPR2022 | SHIFT:当前自动驾驶最大的多任务合成数据集(雾天/雨天/雪天,检测、分割、深度图、实例分割、光流)
发布人
数据集下载路径:www.vis.xyz/shift 论文链接:https://arxiv.org/abs/2206.08367 适应不断变化的环境是所有自动驾驶系统不可避免地面临的安全关键挑战。然而,现有的图像和视频驱动数据集无法捕捉真实世界的可变特性。在本文中,我们介绍了用于自动驾驶的最大多任务合成数据集。它包含了雨天、雾天、雪天、一天时间、车辆和行人密度的离散和连续变化场景,SHIFT具有多个主流感知任务的综合传感器套件和注释。
打开封面
下载高清视频
观看高清视频
视频下载器
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
【IROS 2022】超大规模环视鱼眼数据集!SynWoodScape:8万张图像,十多个任务标注(检测/分割/深度/光流/事件等)
【全463集】禁止自学走弯路!环境感知、目标检测、语义分割、强化学习、决策与控制算法等八大自动驾驶核心算法一口气学完!
StradVision - 语义分割和深度图预测demo
CVPR2022 oral | 弱监督Lidar点云分割SOTA!8% 标注数据下达到 95.7% 的全监督性能!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
刷爆!【深度学习-图像分割】图像分割+语义分割Unet原理讲解及项目实战教程!(人工智能、神经网络、机器学习、机器学习算法、Unet论文、Unet医学)
【200集全】CV十天入门到起飞!一口气学完Python、OpenCV、深度学习基础、PyTorch、卷积神经网络、目标检测、图像分割等计算机视觉必备基础与实战
适用任意相机模型!高通提出的BEV分割框架DaF-BEVSeg来了
MetaBEV:解决BEV检测和地图分割的传感器故障新方案
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
究极全面!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
逆天了!新加坡国立最新 | 分割任意3D物体
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
最新,语义分割三十年!基础与前沿进展!
端到端算法是什么?自动驾驶领域是怎么做的?
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
NeRF-RPN:第一个有效的基于NeRF的目标检测框架
NeurlPS'24 开源 | UAV3D 无人机大规模3D感知基准 数据集助力3D目标检测与跟踪
原理代码讲解|多尺度大核注意力 图像通用 CVPR2024 【V1代码讲解041】
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
【ECCV 2022】清华大学&字节跳动提出 ParticleSfM:从单目视频中估计运动相机的位姿
原理代码讲解|傅里叶频域动态聚合模块 CVPR2024 动态滤波高低频 傅里叶变换 图像领域通用【V1代码讲解036】
什么是端到端自动驾驶?什么是基础world model?
完整200讲!北大博士系统讲解【OpenCV】入门到进阶,包含图像识别、图像分割、目标检测等多个核心项目实战!
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
Transformer分割检测大模型技术分享:Transformer基础
原理代码讲解|大核注意力backbone尾部模块 CVPR2024 可以作为创新脚手架 图像通用 百度发布【V1代码讲解043】
端到端算法有哪些优势?完爆传统感知规控?
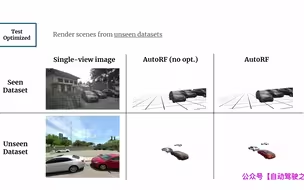
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
自动驾驶多传感器数据融合(3):单目标跟踪算法
端到端数据格式是什么样的?快来看看吧
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
83FPS,史上最快 | IA-SSD: 基于point方式的高效激光雷达点云3D目标检测网络(CVPR2022)
yolo v11 都做了哪些修改 ?
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
原理代码讲解|门控空间注意力单元模块 低参数量 MLP替代方案 图像通用 CVPR2024 百度发布【V1代码讲解042】