V
主页
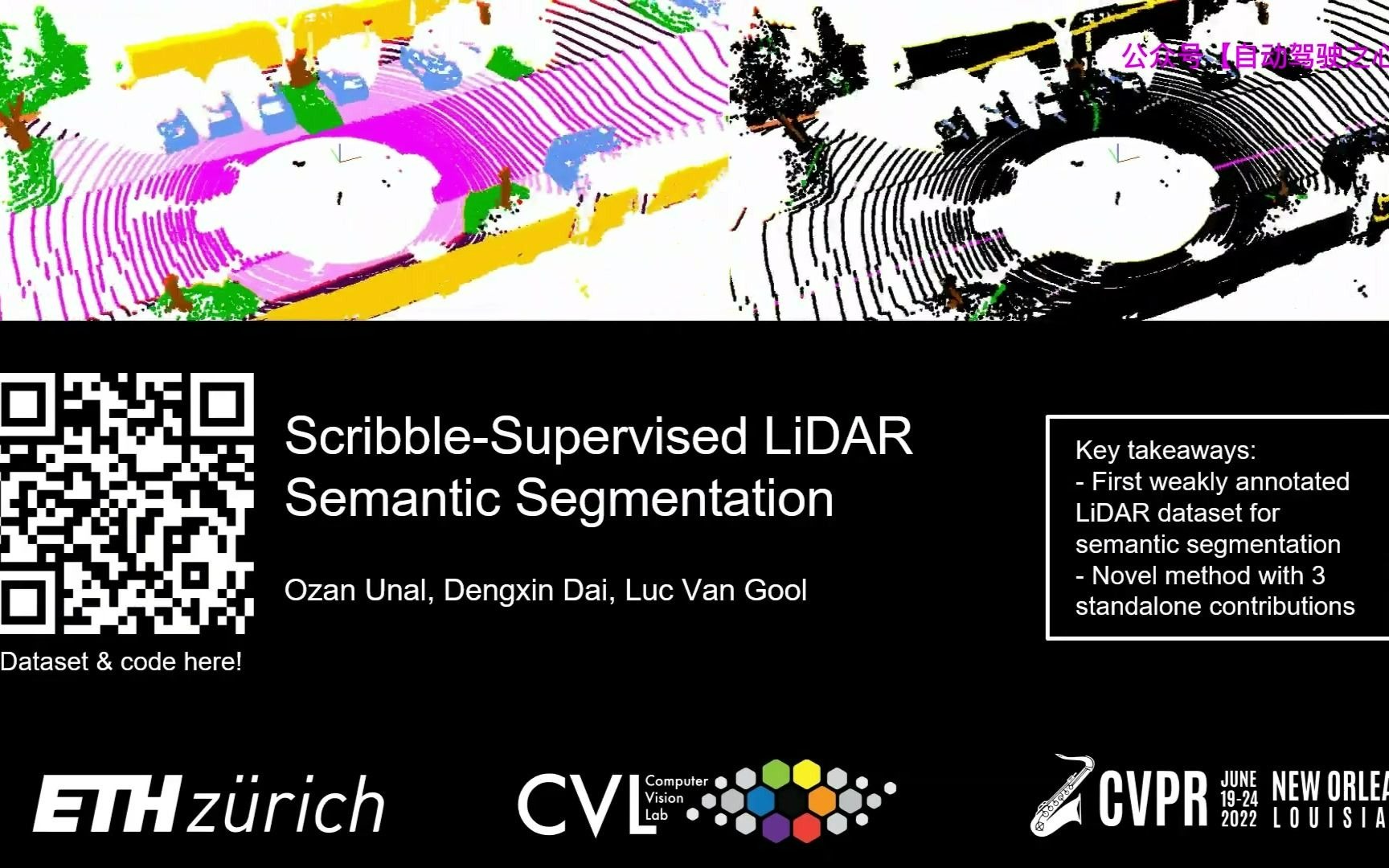
CVPR2022 oral | 弱监督Lidar点云分割SOTA!8% 标注数据下达到 95.7% 的全监督性能!
发布人
论文链接:https://arxiv.org/pdf/2203.08537.pdf 代码链接:https://github.com/tensorflow/lingvo/ 论文主要解决点云密集标定资源昂贵问题,通过弱监督来实现有效的3D语义分割,发布了第一个用于3D 语义分割的涂鸦标注(scribble-annotated)数据集 ScribbleKITTI!由于许多未标注的点未被使用,使得模型性能有所下降,为此论文提出了一套高效的pipeline,可以与任何 LiDAR 语义分割模型相结合。在只使用 8% 标注的情况下,可达到 95.7% 的全监督性能。
打开封面
下载高清视频
观看高清视频
视频下载器
Segment Any Point Cloud:运用视觉基础模型分割一切点云
KITTI SOTA!即插即用,单目3D检测中的单应性损失!(CVPR2022)
ECCV2022 | Box2Mask:强!mAP-50达到全监督97%!
牛津大学CVPR2024 oral | MicKey:特征点检测方法,无需深度测量推断pose!
CVPR2022 | MeMOT:具有记忆的多目标跟踪
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
【ICCV 2023】HAMLET:实时语义分割域自适应方法
【ICCV 2023】 Robust Depth:多种天气条件下的自监督单目深度估计新SOTA
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
速度超快!激光雷达序列的在线分割:数据集和算法(ECCV2022)
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
【IROS 2022】机器人超硬核点云配准方法:Linewise Non-Rigid Point Cloud Registration
太详细了!多传感器融合的策略和方法
Nuscenes、KITTI等多个BEV开源数据集介绍!
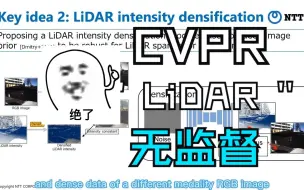
CVPR 2023 | 使用LiDAR强度的无监督内在图像分解
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
搞懂了!原来激光雷达和相机的内外参是这样标定的
超越Lidar?聊一下4D Radar在自动驾驶中的优势和应用!
适用任意相机模型!高通提出的BEV分割框架DaF-BEVSeg来了
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
渲染速度提高5倍!GaussianOcc:借助3D GS,没有标注也能做Occ(东京大学)
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
CVPR2022 | NICE-SLAM:神经隐式表示在大型室内场景上的密集重建
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
系统回顾!基于Visual Transformer的分割模型综述
CVPR2024 | 逆天了!一统所有目标感知任务,目标感知基础模型GLEE
端到端算法是什么?自动驾驶领域是怎么做的?
端到端数据格式是什么样的?快来看看吧
ICRA2023 | 激光雷达相机内外参联合标定方案!
自动驾驶多传感器数据融合(3):单目标跟踪算法
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
世界模型!特斯拉CVPR2023 Workshop!
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
CVPR2023:Wamyo挑战赛分享(轨迹预测/分割/姿态估计/运动预测)
TensorRT部署车道线检测最强算法!Ultra-Fast-Lane-Detection-V2
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
使用概率深度补全的3D激光雷达重建(IROS2022)