V
主页
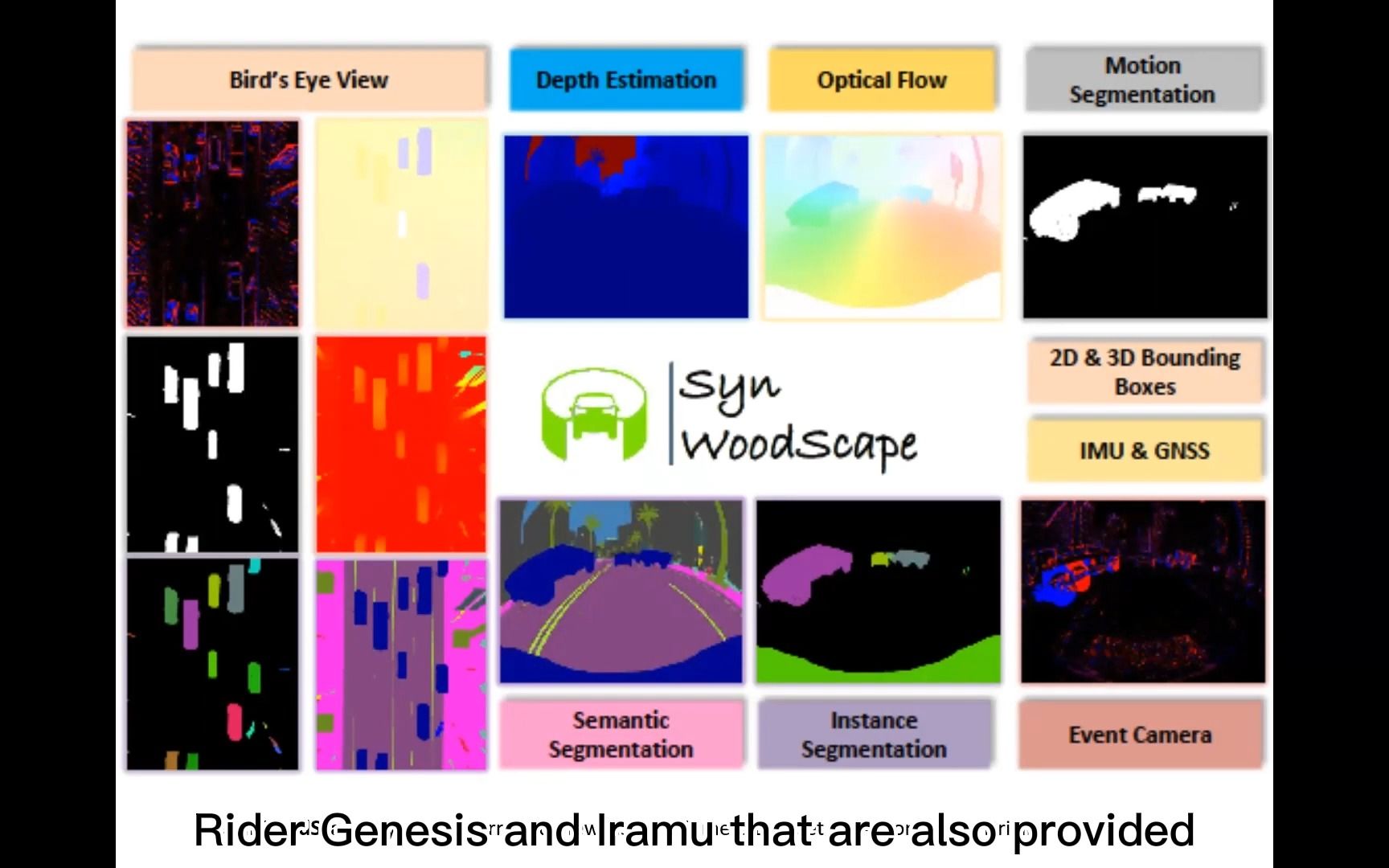
【IROS 2022】超大规模环视鱼眼数据集!SynWoodScape:8万张图像,十多个任务标注(检测/分割/深度/光流/事件等)
发布人
论文链接:https://arxiv.org/pdf/2203.05056.pdf 视频链接:https://www.youtube.com/watch?v=1x4_pxDyWYI&ab_channel=A.R.SEKKAT 环视摄像头是自动驾驶的主要传感器,用于近场感知。它是商用车辆中最常用的传感器之一,主要用于停车可视化和自动停车。四个具有 190° 视野的鱼眼摄像头覆盖车辆周围的 360°。由于其高径向失真,标准算法不容易扩展。此前,我们发布了第一个名为 WoodScape 的公共鱼眼环视数据集。在这项工作中,我们发布了环绕视图数据集的合成版本,涵盖了它的许多弱点并对其进行了扩展。首先,不可能获得像素级光流和深度的基本事实。其次,WoodScape 没有同时注释所有四个摄像机以采样不同的帧。然而,这意味着多相机算法无法设计为在鸟瞰空间中获得统一的输出,这在新数据集中启用。我们在 CARLA 模拟器中实现了与 WoodScape 的配置相匹配的环视鱼眼几何投影,并创建了 SynWoodScape。我们从合成数据集中发布了 80k 图像,其中包含 10 多个任务的注释。我们还发布了基线代码和支持脚本。
打开封面
下载高清视频
观看高清视频
视频下载器
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
速度和精度双SOTA! TPAMI 2022最新车道线检测算法(Ultra-Fast-Lane-Detection-V2)
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
ECCV2022 | Box2Mask:强!mAP-50达到全监督97%!
视觉3D检测如何做自动标注?
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
计算机视觉10天快速入门到起飞!Python/OpenCV/神经网络基础/PyTorch/CNN/目标检测/图像分割,迪哥200集带你全部吃透!
【IROS 2022】旅行时间减少47%!FAR Planner:使用动态可见性更新的快速、可尝试的路径规划
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
【自动标注】X-Anylabeling使用教程,附辅助包
CVPR2022 oral | 弱监督Lidar点云分割SOTA!8% 标注数据下达到 95.7% 的全监督性能!
StradVision - 语义分割和深度图预测demo
渲染速度提高5倍!GaussianOcc:借助3D GS,没有标注也能做Occ(东京大学)
太详细了!多传感器融合的策略和方法
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
Transformer分割检测大模型技术分享:Transformer基础
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
毕设有救了!【OpenCV+YOLO+U-net图像分割+MASK-RCNN目标检测】实战项目系列,计算机博士手把手带你搞定毕设!深度学习/计算机视觉/项目实战
内卷时代如何降低自动驾驶数据的标注成本?双域主动学习可能是答案!
吹爆!六小时速通,深度学习之图像处理+目标检测+图像分割超全教程来啦!(matlab/计算机视觉/人工智能/深度学习/机器学习/图像处理/计算机视觉)
MonoPLFlowNet:用于单目图像的现实尺度 3D 场景流估计(ECCV2022)
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
逆天了!基于分层3D高斯表示的超大数据集实时渲染(SIGGRAPH 2024)
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
【ICRA2022】ORFD:第一个野外Freespace检测数据集
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
【NeurIPS 2022】多任务自适应SOTA!Polyhistor:密集视觉任务的参数高效算法(分割/部件/显著图/表面法线)
【ECCV 2022】最佳论文奖!部分距离相关在深度学习中的多种应用
IROS 2024 | 苏黎世大学全新视觉里程计,性能暴涨60%!
巨简单!这可能是B站讲的最细的计算机视觉(图像处理+目标检测+图像分割)全系列课程了,全是干货,比刷剧还爽!深度学习/人工智能/计算机视觉/CV
什么是端到端自动驾驶?什么是基础world model?
使用概率深度补全的3D激光雷达重建(IROS2022)
端到端算法是什么?自动驾驶领域是怎么做的?
鱼眼相机和超声波雷达是怎么做融合的?
NeRF-RPN:第一个有效的基于NeRF的目标检测框架
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
【计算机视觉入门】天花板教程!200集从深度学习神经网络到图像分类、目标检测、图像分割入门到实战通俗易懂,全是干货!(附课件代码)