V
主页
京东 11.11 红包
直播分享!最新SOTA,多模态3D目标检测新方案(CVPR2023)
发布人
公众号【自动驾驶之心】后台回复“多模态“获取课件PPT!最新SOTA,多模态3D目标检测新方案(CVPR2023)! 1.多模态三维目标检测简介; 2.虚拟点三维目标检测存在的问题; 3.基于虚拟稀疏卷积的三维目标检测;
打开封面
下载高清视频
观看高清视频
视频下载器
世界模型!特斯拉CVPR2023 Workshop!
大火的BEVFusion算法详解
EMNLP 2024预讲会|10月19日下午场 多模态等方向
06 自动驾驶中实战基础之3D-2D求解方法(PnP系列)[Camera + LiDAR + Radar + IMU]
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(上篇)
【唐宇迪带你学AI】更新到v11!2024最新版目标检测YOLO算法全系列,从v1到v11一次学到饱,简直不要太爽!
特斯拉的4D自动标注详解!为什么无标注数据work?
【YOLOv11速通】迪哥13分钟教你使用自己的数据集从环境搭建到模型训练、推理、导出一条龙实操,入门到精通!-YOLO/目标检测/人工智能/计算机视觉
草履虫都能毕业!【Opencv+YOLO实时目标检测】,计算机视觉方向从零到实战,带你做毕设!机器学习,深度学习,计算机视觉,Opencv,YOLO
手撕llama32处理图片,喂饭级教程,全程敲写代码,吴恩达AI课程llama32多模态处理辅助,非常详细,适合新手学习
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
ECCV2022 | 3D目标检难例挖掘首篇工作!(Wamyo出品,改进3D检测中的类内长尾)
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
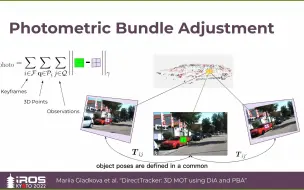
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
【唐宇迪目标检测板块】快速水一篇高质量论文,迷惑性极强,三折叠怎么折都过审
07 自动驾驶中实战基础之点云去畸变与对齐实战.(Camera + LiDAR + Radar + IMU)
Transformer分割检测大模型技术分享:Transformer基础
多传感器融合!BEV感知融合算法介绍
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
高效特征提取模块,YOLOv8v10v11创新涨点改进 | CMUNext即插即用模块,有效暴涨15个点,适用于目标检测,图像分割,图像增强等所有CV任务通用
YOLOv11+双目立体匹配融合,进行实例分割、测距和点云重建!
强推!2024最新YOLO目标检测模型解析,大佬带你3小时快速入门YOLOv11与YOLOv8!
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
图像分割、目标检测、特征提取、边缘检测、图像滤波、人脸识别,这绝对是B站最适合入门学习的OpenCV计算机视觉课程!从入门到图像处理实战!人工智能丨深度学习丨
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
BEV-SAN:通过切片注意力网络实现精确的BEV 3D检测
自动驾驶 3D LiDAR目标跟踪技术实现细节大揭秘!
YOLOv5+deepsort 目标检测与跟踪,写进简历的深度学习视觉项目
全网首发!YOLOv11代码讲解,相比v8v9v10都做了哪些改进?以后默认用v11版本了吗?(计算机视觉/目标检测/深度学习))
OpenCV入门到进阶!不愧是公认的讲的最好的【OpenCV全套教程】清华大佬12小时带你从入门到进阶(OpenCV/计算机视觉/人工智能/AI)
【研三】自研多模态大模型架构——长时程、高鲁棒
【全集188集】深度学习必看圣经!李沐大神《动手学深度学习》最新版全套保姆级教程分享,比啃书高效!小白也能信手拈来!(深度学习/神经网络/pytorch)
IROS2022 | MIMOSA:针对传感器退化的多模态SLAM框架
YOLOv5零基础入门!博导耗时10小时精讲YOLOv5从环境配置到项目实战,带你快速训练自己的数据集!
【YOLOv11】一小时速通版!知名博士逐一解读配置文件以及代码复现,环境安装+推理+自定义数据集搭建与训练,入门到精通!
自动驾驶中的多传感器融合状态估计如何建模?
(ICME 2023)即插即用卷积线性融合Transformer,助力小目标检测起飞