V
主页
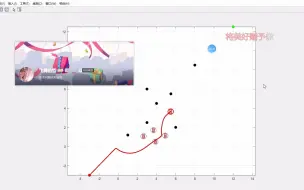
小球与椭圆碰撞模拟 matlab
发布人
在椭球内部随机分布N个刚性圆球,由于受万有引力的影响,它们会向下运动做自由落体运动,并被椭圆壁再次反弹到高处,再下落。。。。。 依据动量守恒定律和能量守恒定律对小球的碰撞进行模拟
打开封面
下载高清视频
观看高清视频
视频下载器
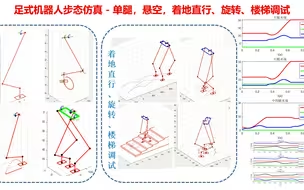
足式机器人步态仿真、单腿、悬空、着地直行、旋转、爬楼梯联合调试
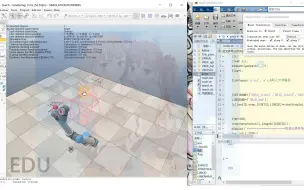
示教展示机器人碰撞检测过程 — 最直观的方式看懂碰撞检测
人工势场动态避障,二维APF
五次&三次多项式连续轨迹规划
NUBUS五次非均匀B样条轨迹规划及机械臂仿真
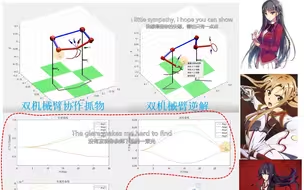
主从机械臂||双机械臂跟随控制
基于倒立摆模型的双足机器人爬楼梯运动控制
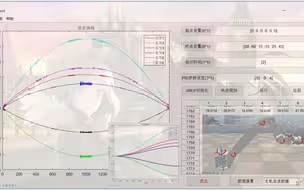
机械臂轨迹规划matlab、Vrep联合仿真
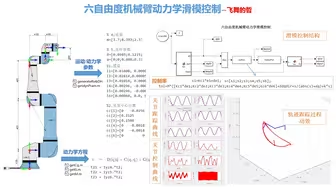
六自由度机械臂动力学滑模控制
基于粒子群/遗传算法的取件机械手轨迹综合优化设计
机器人示教仿真
改进RRT路径规划与轨迹规划
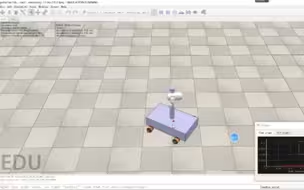
麦克纳姆轮云台控制仿真
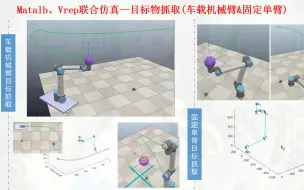
六自由度机械臂目标物抓取-车载&单臂matalb、vrep联合仿真
机械臂碰撞检测双臂检测单臂与障碍物检测
六自由度机械臂重力补偿控制
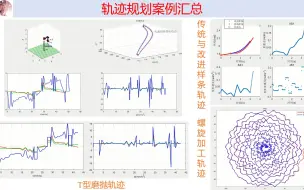
轨迹规划案例汇总
四足机器人步态仿真
小段曲线速度、姿态连续轨迹规划及运动仿真
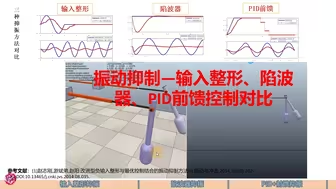
振动抑制—输入整形、陷波器、PID前馈控制对比
NURBS曲面拟合、平滑、网格控制点反算、法面误差计算一网打尽
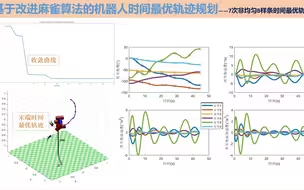
基于改进麻雀算法的机器人时间最优轨迹规划——7次非均匀B样条轨迹
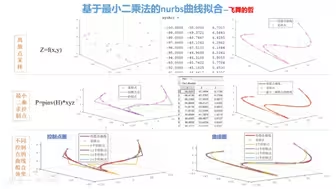
基于最小二乘的nurbs曲线拟合
基于非线性干扰观测器的六自由度机械臂控制
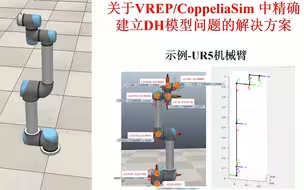
关于VREP/CoppeliaSim 中精确建立DH模型问题的解决方案 - ur5机器人视频教程
人形机器人控制仿真
样条曲线轨迹规划
编队集群控制
无人机与小车的协同轨迹跟踪控制
双臂机器人仿真
分解控制
基于零空间的任务级优先控制wbc、ROS、matlab
姿态控制
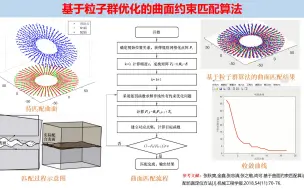
基于粒子群优化的曲面约束匹配算法
机器人连续位姿同步插值轨迹规划——对数四元数、b样条曲线、c2连续位姿同步规划
六自由度机械臂+模型预测控制MPC+倒立摆+二自由度机械臂
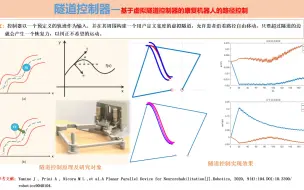
隧道控制器基于虚拟隧道控制器的康复机器人的路径控制
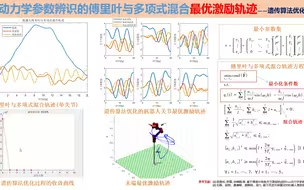
动力学参数辨识的傅里叶与多项式混合最优激励轨迹
物理:虐你如呼吸
Delta并联机器人门型轨迹规划