V
主页
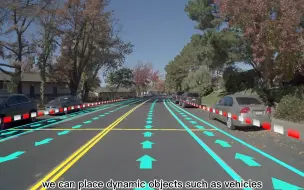
点云地图中的重定位
发布人
视频链接:https://www.youtube.com/watch?v=suFzr1HcRGI&ab_channel=Exwayz 在巴黎第13区创建地理参考3D地图很酷,在其中进行定位更棒!
打开封面
下载高清视频
观看高清视频
视频下载器
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
Nvidia强大的神经重建引擎:场景重建和事件注入(Neural Reconstruction Engine,NRE)
ParkingE2E:纯视觉端到端泊车网络(秦通团队出品)
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
自动驾驶汽车是如何在高精地图中建立精确位置的?
自动驾驶中的多传感器融合状态估计如何建模?
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
[三维重建] IEEE TVCG论文解读PCKRF点云补全和关键点细化的6D位姿估计方法
UncertaintyTrack: 利用检测和定位不确定性进行多目标跟踪
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
【IROS 2022】机器人超硬核点云配准方法:Linewise Non-Rigid Point Cloud Registration
在线高精地图与城市NOA是什么关系?为什么如此重要?
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo
从0到1!彻底搞懂BEVFormer算法原理
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
CVPR 2023 | 通过点云预测作为4D Occupancy 预测的代理
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
反光柱定位算法-重复定位精度测量(实测重复定位数据1cm以内)
在网上犯罪,是如何被定位的
自动驾驶绕不开的仿真!LightSim:从零开始搭建一个真实、可控、可扩展的自动驾驶仿真平台
YOLOv11+双目立体匹配融合,进行实例分割、测距和点云重建!
SLAM着色点云模型三维重建!
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
自动驾驶仿真框架CARLA教程(6):Longer-term model results
学会这样聊天让对方三秒之内喜欢上你
太亮眼!CVPR 2024 自动驾驶方向中稿论文POSTER大全!
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
看完特斯拉AI团队公布的最新自动驾驶发展蓝图,真的太震撼了!必须跟大家分享一下
端到端算法是什么?自动驾驶领域是怎么做的?
IROS2022 | 连续时间立体视觉惯性里程计
【日常调试】Autoware上车调试的日常,线下课程筹备中
我们用了数万张照片,将回忆收入囊中!!!
数据为王!自动驾驶开源数据体系现状与未来
华为智驾,这高速表现完美了,谁能看出是自动驾驶的?
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
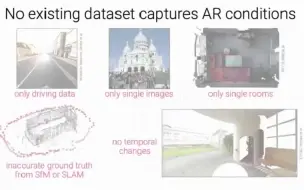
【ECCV 2022】 获取的真值更准确!LaMAR:AR中的定位和建图新基准