V
主页
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
发布人
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高) 视频链接:https://www.youtube.com/watch?v=2dUyflBInBU&t=2s
打开封面
下载高清视频
观看高清视频
视频下载器
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
多传感器标定的工具箱有哪些?
LVI-SAM和LIO-SAM、LeGO-LOAM效果对比
高精地图制作关键技术及领域主流方案分享-part1
香港科技最新!Contour Context:3D激光雷达回环检测和度量姿态估计的抽象结构分布(ICLR2023)
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
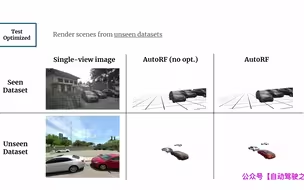
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
香港理工最新 !SLAMesh:激光雷达传感器的SLAM系统,实时构建和利用网格
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
LIO-SAM:一种紧耦合激光雷达-惯性里程计
自动驾驶中的多传感器融合状态估计如何建模?
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
CVPR2022 | NICE-SLAM:神经隐式表示在大型室内场景上的密集重建
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
ICCV2023 | MPOT:多平面目标跟踪
医学图像三维重建Demo OpenCV Qt VTK CT图像三维重建
恶劣天气可拿捏不了我的鲁棒性!AAAI大佬来助攻
速度快!MobileNeRF:移动端实时渲染方案,Nerf导出Mesh
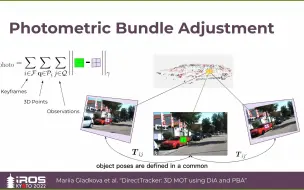
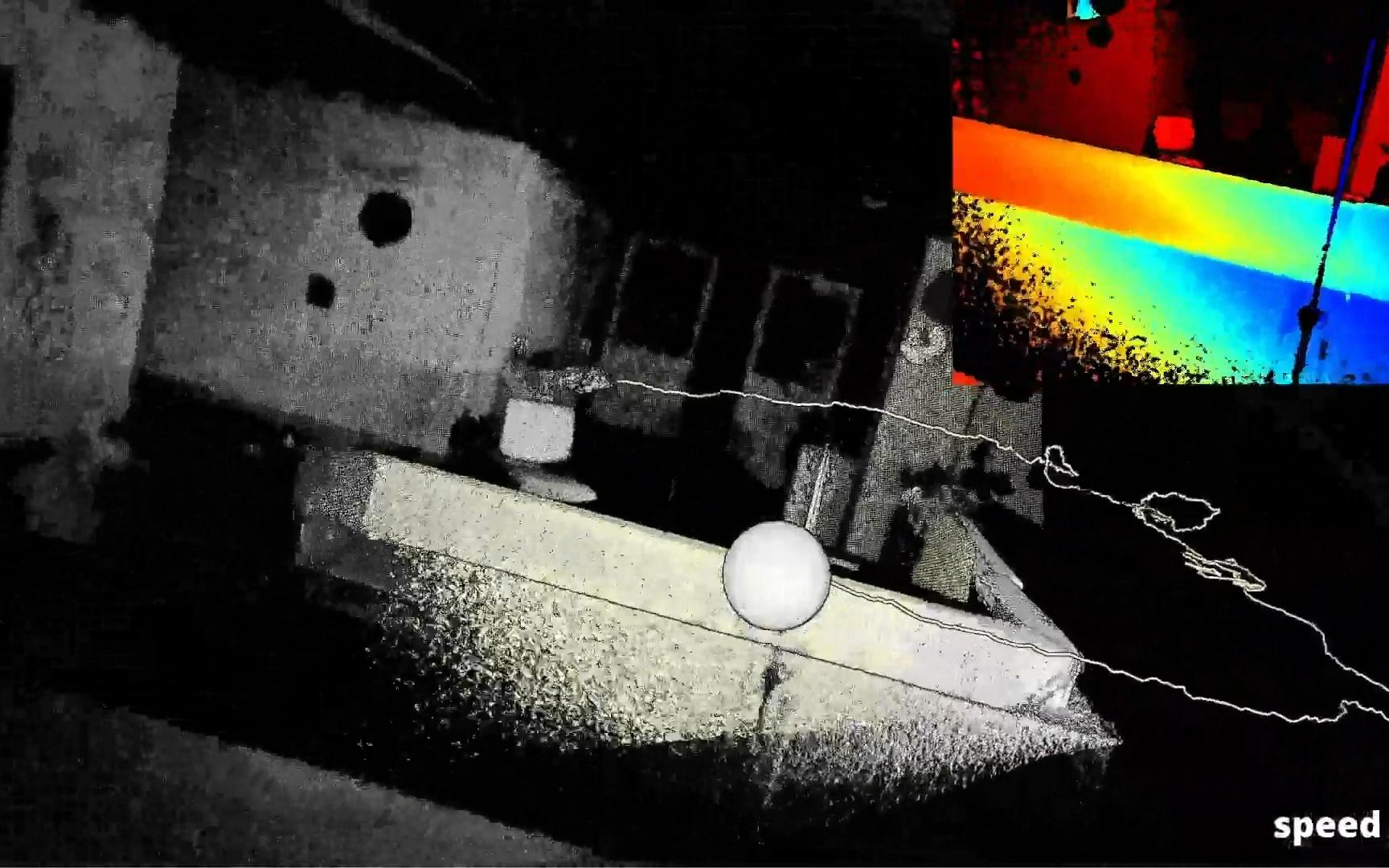
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
毫米波雷达量产实战!Radar是如何获取点云的?
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
【SLAM】【VIO】室内狭窄空间.三维重建【空间计算】
英伟达最新!SCube:仅用三张图,就能实现即时大规模三维场景重建
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
毫米波雷达视觉算法CRAFT,这次彻底理解了!
【ICRA 2023】COVINS-G: 一种协同可视化惯性 SLAM 通用后端
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
数据为王!自动驾驶开源数据体系现状与未来
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
大牛带你彻底搞懂UltraFastLane车道线检测算法(一)
太详细了!多传感器融合的策略和方法
端到端基础!绕不开的感知模块