V
主页
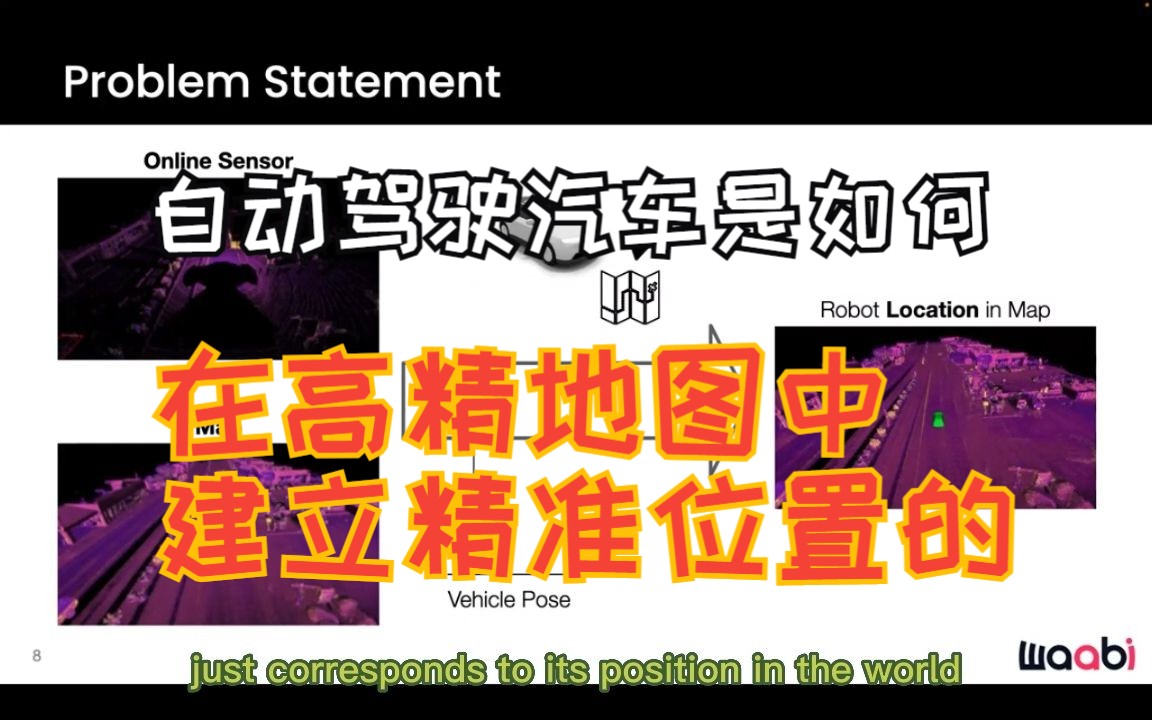
自动驾驶汽车是如何在高精地图中建立精确位置的?
发布人
本节将帮助您了解自动驾驶汽车如何在高精地图中牢固地建立其精确位置,以利用它们实现安全高效的自动驾驶。将涵盖广泛的定位方法,涵盖各种主题,如位置识别、地图匹配、点云配准,以及神经SLAM的新兴领域。 欢迎关注【自动驾驶之心】公众号,干货资讯第一时间到达。 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) 1、国内首个基于Transformer的分割检测➕视觉大模型课 2、Occupancy从入门到精通全栈课程(理论➕实战) 3、自动驾驶中的多传感器融合与目标跟踪(从入门到精通) 4、国内首个多模态3D目标检测全栈教程(前融合/特征级融合/后融合) 5、YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 6、国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) 7、多传感器融合中的毫米波雷达-视觉融合感知全栈教程 8、Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 9、模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 10、规划控制理论&实战课程:PID、LQR、MPC全掌握 11、国内首个工业级车道线检测课程,从单目2D、单目3D到BEV车道线!!! 12、国内首门面向量产的单目3D与单目BEV感知教程!!! 13、Nerf与自动驾驶论文带读课程!!! 14、轨迹预测理论+实战教程!!! 15、轨迹预测与自动驾驶论文带读课程!!! 16、点云3D目标检测理论与实战教程!!! 17、国内首门毫米波&4D毫米波雷达理论实战教程!!! 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。
打开封面
下载高清视频
观看高清视频
视频下载器
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
在线高精地图与城市NOA是什么关系?为什么如此重要?
量产基石!MapTR:在线高精地图经典开山之作
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
ICLR'24无图新思路!LaneSegNet:基于车道分段感知的地图学习(实时推理+三项SOTA)
透彻!特斯拉occupancy network详解
CVPR 2023 | OrienterNet:基于神经匹配的2D公共地图视觉定位
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
搞懂了!原来激光雷达和相机的内外参是这样标定的
端到端数据格式是什么样的?快来看看吧
什么是端到端自动驾驶?什么是基础world model?
大火的BEVFusion算法详解
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
端到端自动驾驶:SparseDrive 算法详解
为自动驾驶构建城市规模的神经辐射场
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
南洋理工大学博士分享!规模化可学习与交互式的自动驾驶决策系统如何构建?
端到端基础!绕不开的感知模块
轨迹规划新方案!基于差分平坦度的自动驾驶车辆轨迹规划
看看顶级大佬如何梳理L2++决策算法的演进-下
端到端算法是什么?自动驾驶领域是怎么做的?
多模态3D检测相关2D和3D感知基础知识
面试必备!自动驾驶中BEV常考知识点大串讲
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
一文尽览:自动驾驶大语言模型应用综述分享
ITSC2023 | LimSim:长期可交互多场景交通仿真器
史上最全!一次性梳理自动驾驶鲁棒性研究
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
ICRA2023 | 激光雷达相机内外参联合标定方案!
特斯拉的4D自动标注详解!为什么无标注数据work?
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制