V
主页
香港大学最新 | 助力量产!DriveCoT:开环端到端驾驶数据集和Benchmark
发布人
近年来,端到端自动驾驶技术取得了显著进展,表现出系统简单性和在开环和闭环设置下竞争性驾驶性能的优势。然而,端到端驾驶系统在驾驶决策方面缺乏可解释性和可控性,这阻碍了其在真实世界中的部署。本文利用CARLA模拟器收集了一个全面的端到端驾驶数据集,名为DriveCoT。它包含传感器数据、控制决策和思维链标签,用于指示推理过程。利用CARLA排行榜2.0中具有挑战性的驾驶场景,这些场景涉及高速驾驶和换道,并提出了一个基于规则的专家策略来控制车辆,并为其推理过程和最终决策生成了真值标签,覆盖了不同驾驶方面和最终决策的推理过程。该数据集可以作为一个开环端到端驾驶基准,可评估各种推理方面的准确性和最终决策。此外,我们提出了一个名为DriveCoT-Agent的基线模型,它是在我们的数据集上训练的,用于生成推理链预测和最终决策。经过训练的模型在开环和闭环评估中表现出很强的性能,证明了我们提出的数据集的有效性。 论文链接:https://arxiv.org/abs/2403.16996 项目链接:https://drivecot.github.io/
打开封面
下载高清视频
观看高清视频
视频下载器
FSD V12.5.6.3测评 AI4芯片 模型体积扩大三倍,高速端到端,更早的路线规划?具体怎么样!
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
今年的智驾只有一个声音:端到端+大模型
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
端到端数据格式是什么样的?快来看看吧
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
LMDrive:使用大型语言模型的闭环端到端自动驾驶驾驶
端到端自动驾驶:SparseDrive 算法详解
端到端智驾是什么?有什么优点?信息量大,没耐心就不要点啦~
都在聊大模型,那怎么评价多模态大模型的好坏呢?
端到端,技术战还是口水仗?
多模态大模型的时代 | 多模态大模型的基本概念
端到端基础!绕不开的感知模块
专注于学习PnC的端到端方法详解
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
端到端算法是什么?自动驾驶领域是怎么做的?
新时代降临!多模态大模型的结构范式都有啥?
端到端算法有哪些优势?完爆传统感知规控?
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
华为aeb失效?阿维塔11刚更新ads3.1就撞了!
KTH最新SOTA!大规模回环闭合 | 基于NeRF的稠密SLAM
比亚迪秦体验开源 openpilot 辅助驾驶
PLUTO算法详解:端到端首次超越基于规则的方法
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
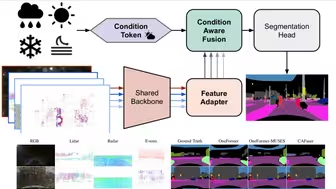
ETH新作CAFuser:条件 感知多模态融合 ,实现对 驾驶场景的稳健语义感知,多个下游任务SOTA!
打 倒 一 切 反 贼 ! 第一集
新时代降临!多模态大模型的训练范式都有啥?
自动驾驶仿真大观:聊聊仿真的研究背景
冠军!英伟达荣获CVPR端到端自动驾驶挑战赛第一名
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划
【双语】特斯拉FSD V13,为迈向无监督自动驾驶做准备
ZWQ震威奇也开始玩打碟了?ZWQ注塑双版本block 26 viper和glock026山楂片发射器
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
阿维塔07之(真or假大冤种ultra车主?有话说🙋)沉浸式分享增程版07驾驶感受
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
理想次世代端到端智能驾驶
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
【CVPR 2024 】ViDAR视觉点云预测赋能大规模端到端自动驾驶