V
主页
冠军!英伟达荣获CVPR端到端自动驾驶挑战赛第一名
发布人
论文链接:https://arxiv.org/abs/2406.06978
打开封面
下载高清视频
观看高清视频
视频下载器
太亮眼!CVPR 2024 自动驾驶方向中稿论文POSTER大全!
端到端自动驾驶离我们还有多远?Think Twice:CVPR 2023闭环新SOTA!
端到端算法是什么?自动驾驶领域是怎么做的?
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
端到端自动驾驶:SparseDrive 算法详解
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
【CVPR 2024】鉴智机器人算法大佬揭秘3D场景流估计的最新工作——3DSFlabelling
端到端算法有哪些优势?完爆传统感知规控?
特斯拉的World Model是什么?怎么做端到端训练?
CVPR2022 | MeMOT:具有记忆的多目标跟踪
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
透彻!特斯拉occupancy network详解
CVPR'23 | OCTraN:非结构化交通场景中的3D占用卷积Transformer网络
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers
校招和社招转行人必看!2023年如何入局自动驾驶?
英伟达最新!SCube:仅用三张图,就能实现即时大规模三维场景重建
CVPR2023 Highlight | Unisim:Nerf+自动驾驶,这不会是魔法吧?
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
CVPR 2023 | 使用LiDAR强度的无监督内在图像分解
什么是端到端自动驾驶?什么是基础world model?
2023年自动驾驶行业会升温吗?
比赛冠军方案!英伟达最新 | Hydra MDP:端到端多模态规划
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
CVPR 2023 | Mask DINO:面向检测和分割的统一Transformer最强框架!
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
在线高精地图与城市NOA是什么关系?为什么如此重要?
MonoPLFlowNet:用于单目图像的现实尺度 3D 场景流估计(ECCV2022)
面向下一代自动驾驶:全栈里程碑综述汇总
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
CVPR 2024 | 相机标定算法再升级!基于圆锥曲线的无偏估计~失真也好用!
自动驾驶中的多传感器融合状态估计如何建模?
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
ICRA2023 | 激光雷达相机内外参联合标定方案!
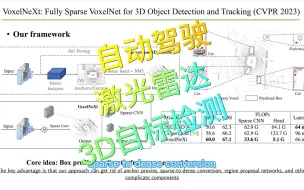
CVPR 2023:VoxelNeXt:用于3D目标检测和跟踪的全稀疏新框架!
经验之谈,轨迹预测真正重要的是什么?
特斯拉的4D自动标注详解!为什么无标注数据work?