V
主页
iCAR 2023 | PolyMerge:一种利用多段线进行动态高精地图更新的新技术
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
在线高精地图与城市NOA是什么关系?为什么如此重要?
高精地图制作关键技术及领域主流方案分享-part1
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
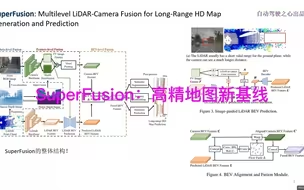
SuperFusion:高精地图新基线
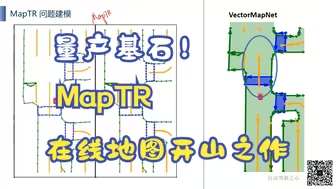
量产基石!MapTR:在线高精地图经典开山之作
什么是端到端自动驾驶?什么是基础world model?
在线高精地图 | TopoMLP:驱动拓扑推理的简单而强大的pipeline
元戎启行联手腾讯地图宣布2024年智能驾驶汽车发布合作
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
城市NOA行不行?聊一聊在线高精地图的边界!
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
ICLR'24无图新思路!LaneSegNet:基于车道分段感知的地图学习(实时推理+三项SOTA)
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
高精地图,启动!纯小白入门Carla仿真之导入高精度地图~
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
特斯拉的World Model是什么?怎么做端到端训练?
数据为王!自动驾驶开源数据体系现状与未来
看完缓解了我的玉玉症!手把手教你如何使用CUDA进行矩阵乘法!
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
毫米波雷达视觉算法CRAFT,这次彻底理解了!
大火的BEVFusion算法详解
Nerf+SLAM会擦出什么样的火花?
最新!如何使用深度强化学习在未知环境中进行导航?
点云地图中的重定位
ECCV2022 workshop | 自动驾驶中的自监督学习part1(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
CVPR 2023 | OrienterNet:基于神经匹配的2D公共地图视觉定位
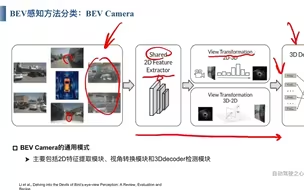
纯视觉/多传感器融合方案!BEV感知方法分类
World Model!大火的世界模型到底是什么?
国内首门自动驾驶轨迹预测课程讲了哪些内容?
分类突破!自动驾驶中的Occupancy感知方法分类
彻底搞懂!CUDA编程之:如何安装Nsight system及compute
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
看到了这个视频,彻底搞懂了PETR算法!
数据太逼真了!DriveDreamer:走向真实世界驱动的自动驾驶世界模型
端到端自动驾驶离我们还有多远?Think Twice:CVPR 2023闭环新SOTA!
搞懂了!原来激光雷达和相机的内外参是这样标定的