V
主页
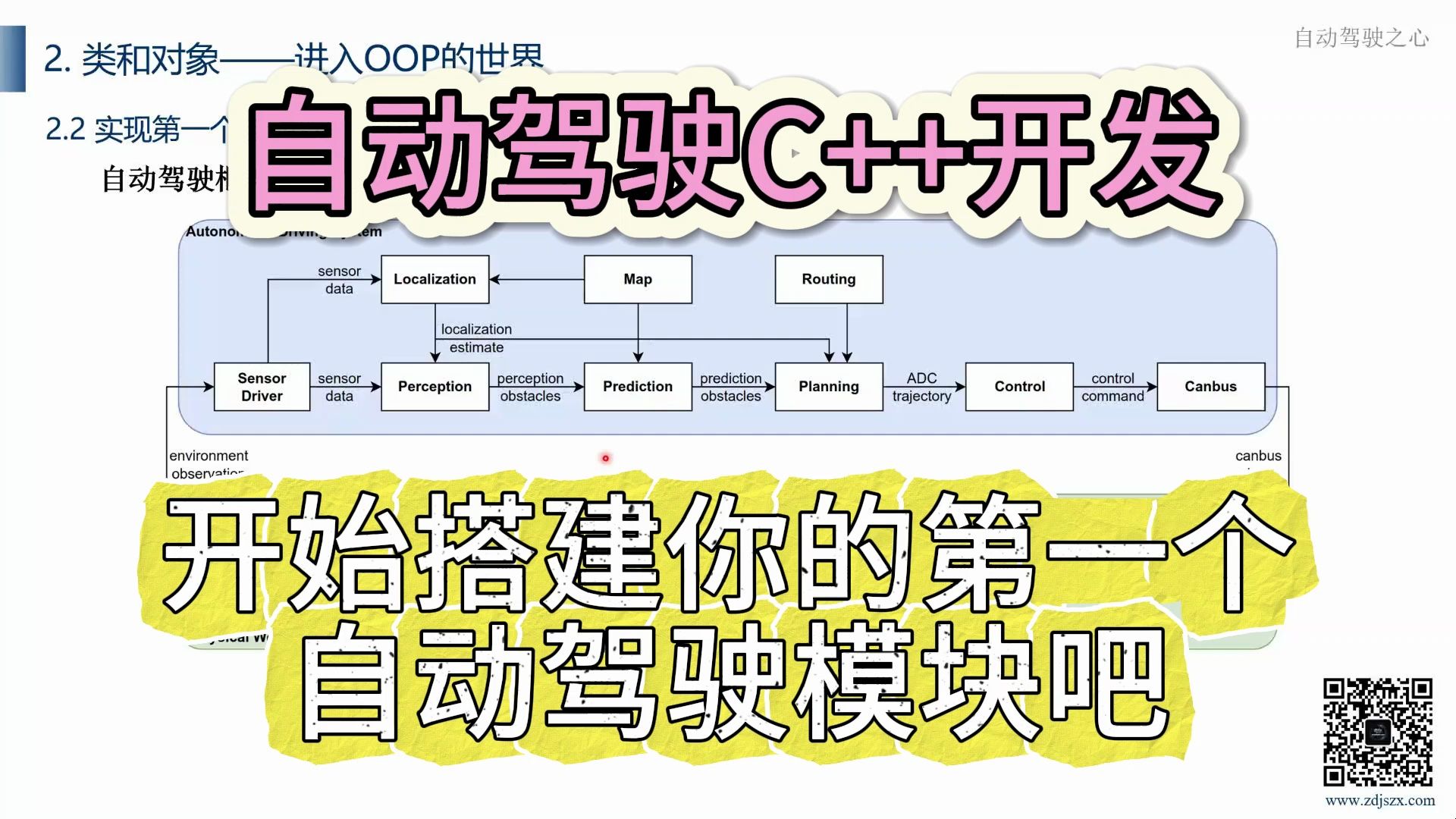
如何从零搭建自己的自动驾驶C++功能模块?
发布人
视频出自国内首个面向自动驾驶领域的C++开发课程,视频链接:https://wrzpl.xetslk.com/s/4u2Zy9
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶落地离不开的C++!快来实现第一个自动驾驶模块吧
大火的BEVFusion算法详解
自动驾驶汽车是如何在高精地图中建立精确位置的?
多传感器标定的工具箱有哪些?
自动驾驶绕不开的仿真!LightSim:从零开始搭建一个真实、可控、可扩展的自动驾驶仿真平台
讲明白了!端到端算法评估指标详解
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
World Model!世界模型,迈向自主机器智能时代!城市场景下的世界模型算法—MILE
规划控制都有哪些模块?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
Nuscenes、KITTI等多个BEV开源数据集介绍!
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
搞懂了!原来激光雷达和相机的内外参是这样标定的
轨迹规划新方案!基于差分平坦度的自动驾驶车辆轨迹规划
分类突破!自动驾驶中的Occupancy感知方法分类
自动驾驶 3D LiDAR目标跟踪技术实现细节大揭秘!
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
CUDA编程实战教程之:流和事件!彻底搞懂~
面向下一代自动驾驶:全栈里程碑综述汇总
端到端趋势下,传统规控还有未来么?
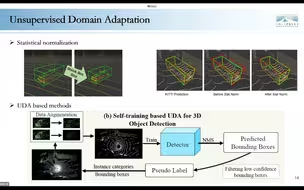
3DTrans | 自动驾驶的可迁移性探究!
多模态3D检测相关2D和3D感知基础知识
毫米波雷达视觉算法CRAFT,这次彻底理解了!
自动驾驶多传感器数据融合(3):单目标跟踪算法
自动驾驶规划控制的未来是什么?
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
特斯拉的World Model是什么?怎么做端到端训练?
数据为王!自动驾驶开源数据体系现状与未来
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
视觉3D检测如何做自动标注?
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
在线高精地图与城市NOA是什么关系?为什么如此重要?
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
ICRA2023 | 激光雷达相机内外参联合标定方案!
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
【汽车人不瞎bb】比亚迪秦7.98万!不是小米su7买不起,而是比亚迪秦更有性价比!
自动驾驶仿真框架CARLA教程(6):Longer-term model results