V
主页
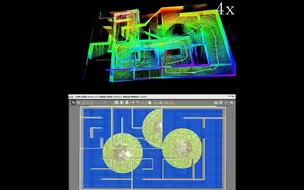
LIO-Fusion:通过与GNSS/重新定位和车轮里程计的有效融合增强LIO
发布人
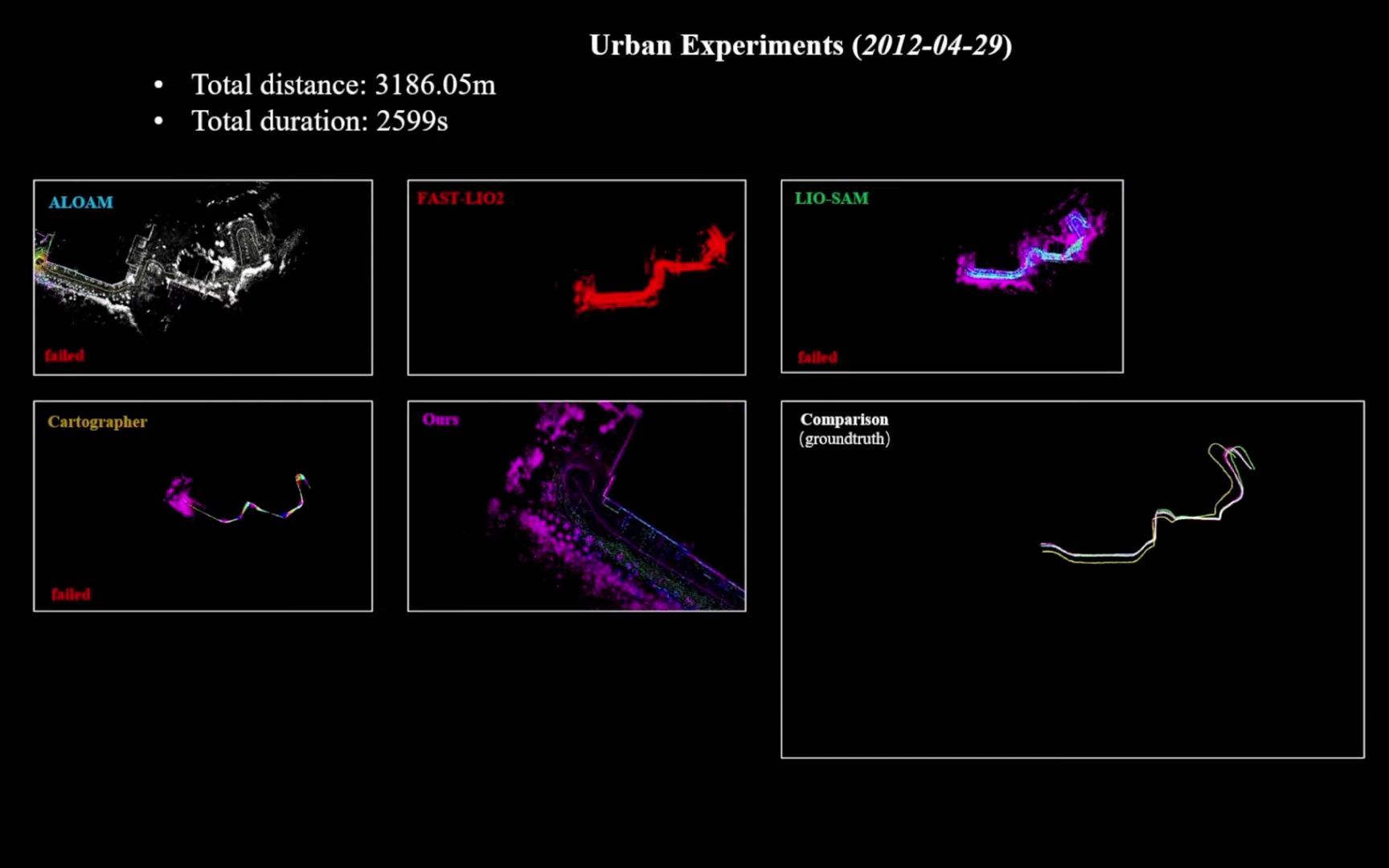
代码链接:https://github.com/wwenhongich/LIO-FUSION LIO Fusion是一种增强型LiDAR惯性里程测量系统,可有效融合GPS/重定位和车轮里程测量,在具有挑战性的感知条件下提供准确、稳健的6-DoF运动估计。我们通过真实世界的实验对实时LIO Fusion系统进行了广泛的评估,并在城市和危险环境中收集的大规模数据集上将其性能与其他最先进的方法进行了比较。结果表明,LIO融合产生了高精度的定位和映射精度以及对传感器故障的鲁棒性。 方法亮点和贡献: 1) 体系结构:提出了LIO Fusion体系结构,该体系结构允许在线初始化后根据传感器的当前可靠性进行自适应融合。该体系结构可以抵御传感器故障,例如LiDAR退化和编码器集成不正确、GPS和先前地图受到干扰/拒绝。 2) LIO的全局和局部增强:通过健康检查将GPS因子和重新定位因子最佳融合,以消除累积误差。此外,通过融合先验状态估计结果,增强了车轮里程测量,以获得可靠的增强局部里程测量,这可以更好地克服激光雷达的退化。 3) 环境鲁棒性:城市和危险实验的比较表明,与其他最先进的方法(如LOAM、FAST-LIO2、LIO-SAM、制图器和LOCUS2.0)相比,LIO Fusion可以更好地估计城市、室内和室外听觉通道、隧道和其他复杂环境中的状态
打开封面
下载高清视频
观看高清视频
视频下载器
喜报•我方电赛&robocup&江苏省机器人大赛无人机定位精度已达1cm!!!(多日不见,水个视频)
【空间计算】VIOBOT2 室内 定位 导航【里程计】【实测】
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
M-LIO:提升传感器信号丢失容忍度的多激光雷达和多IMU里程计
LIO-SAM:一种紧耦合激光雷达-惯性里程计
机械手爬行
“我来帮你升舱”
【IROS 2022】SOTA!基于粒子滤波的机器人定位和建图(浙大)
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
SOTA!ECCV2022 | 实现精确的主动相机定位(Camera Localization)
多传感器融合!BEV感知融合算法介绍
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
强化学习用于四足机器人的高级技能(站立、俯冲行走)
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
多传感器标定的工具箱有哪些?
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
IROS'24开源 | 全新动态V3D-SLAM:3D语义几何投票的动态鲁棒RGB-D SLAM
战双露娜170cm的机器人,长高了的露娜,长大了的露娜,来到现实的露娜,露娜,腿部稍微动一下
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
走路最像人的国产机器人,真的是一股子人味。
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限(上篇)
无人机SLAM入门教程(一):课程概述1.1 SLAM基础概念
【IROS 2022】多模态SLAM框架MIMOSA:一种针对传感器退化的弹性自治多模态SLAM框架
【IROS 2022】机器人超硬核点云配准方法:Linewise Non-Rigid Point Cloud Registration
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
高精地图制作关键技术及领域主流方案分享-part1
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
视觉SLAM VIO开源代码解析
波士顿动力吃饭家伙,连锅带碗被砸。云深处制造山猫机器狗。越野性能极强。#机器狗 #国产机器狗 #科技改变生活 #黑科技 #玩个很新的东西
定位误差小于20cm!MT F-CVT:增强泊车区域感知
LVI-SAM和LIO-SAM、LeGO-LOAM效果对比
将SLAM推向全天候环境!CVPR'24:SubT-MRS Dataset
无人机SLAM入门教程(一):课程概述1.3 传感器简介
【SLAM】【空间计算】RoboBaton系列产品正式亮相【三维重建】【AI赋能】
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
搞懂了!原来激光雷达和相机的内外参是这样标定的
郑州车展红衣大叔跟Ai机器人互动!