V
主页
M-LIO:提升传感器信号丢失容忍度的多激光雷达和多IMU里程计
发布人
视频链接:https://www.youtube.com/watch?v=-xSbfaroEPs 论文链接:https://arxiv.org/pdf/2210.01154 作者提出了一种稳健的状态估计系统,该系统将来自多个激光雷达和惯性传感器的测量与GNSS数据融合。为了启动该方法,作者使用先前的GNSS姿态信息。然后,实时执行增量运动,通过使用因子图框架将激光雷达和IMU信号与GNSS平移组件融合,在全局帧中产生稳健的运动估计。作者还提出了一种新的同步和融合机制来解决信号丢失的方法。为了验证此方法,对使用Scania测试车收集的数据进行了广泛的测试(5个序列,共约7公里)。从评估来看,与融合单个激光雷达/惯性传感器对的SOTA估计器相比,此方法的相对平移和旋转误差平均改善了61%和42%。
打开封面
下载高清视频
观看高清视频
视频下载器
LIO-Fusion:通过与GNSS/重新定位和车轮里程计的有效融合增强LIO
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
相机和激光雷达融合的多车辆跟踪demo
鱼眼相机和超声波雷达是怎么做融合的?
自动驾驶中的多传感器融合状态估计如何建模?
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
什么是三角测距?TOF测距?激光雷达怎么精准测距的?
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第3节:车路协同场景激光雷达部署策略优化方法
港大MARS实验室发布! Fast-LiVO2:快速、直接的激光雷达惯性视觉里程计
2025款海豹,激光雷达、云辇-C、高阶智驾,20万贵吗?
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
传感器标定精度如何验证?(Lidar/Camera/Radar/IMU/鱼眼相机)
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
自动驾驶中的激光雷达点云分割-part2
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
激光雷达眼中的世界
芯探科技纯固态Flash激光雷达XT-S240Pro室外测试可达15米,有效抑制室外强光达100Klux,灰尘滤波算法及杂散点去除
【WACV2023】Voxel-MAE:用于激光雷达点云上自监督预训练的掩模自编码器
首付9999就能开走这台配置华为鸿蒙车机+800V高压平台,关键还给你3颗激光雷达
麻省理工开源!LidarDM: 生成逼真、合理连贯的激光雷达点云数据
IROS2022最新 | 基于激光雷达的三维运动目标分割的高效时空信息融合
Lidar vs. Tesla:自动驾驶路线之争!激光雷达还是纯视觉?
全新智己LS6预售权益价22.99-29.99万元,全系配备灵蜥数字底盘、智慧四轮转向系统、高通8295芯片、激光雷达、英伟达Orin X芯片
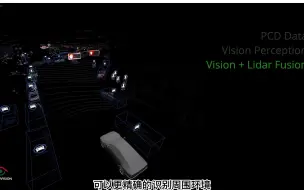
LiDAR-Camera多传感器融合!StradVision X VUERON Technology
搞懂了!原来激光雷达和相机的内外参是这样标定的
16万的车配激光雷达?能好用吗……
超详细的激光雷达相机标定教程!(Lidar-Camera)
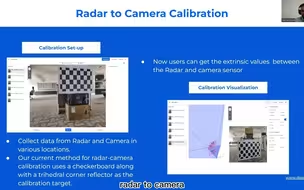
ICRA2023 | 激光雷达相机内外参联合标定方案!
激光雷达为什么无惧黑夜
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
自动驾驶多传感器数据融合(1):什么是多传感器融合?
地下车库自动泊车——依靠激光雷达测距的刹停测试
无监督域适应3D检测SOTA!让激光雷达奔跑起来~
多花上万块选装的毫米波雷达或者激光雷达 究竟有何区别?
史上最全 | 自动驾驶中的多传感器标定校准(Lidra/Radar/Camera/Stereo/IMU等)
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索