V
主页
京东 11.11 红包
3738-来自两个UAV的分布式可变基线双目SLAM
发布人
视觉惯性里计(VIO)已被广泛应用和研究,以控制和帮助机器人的导航自动化,特别是在没有绝对位置测量(如GPS)的情况下。然而,当场景中的可观测地标位于远处时,例如在高空飞行中,VIO中度量尺度估计的保真度会大大降低。为了解决这个问题,在这项工作中,我们利用了由两个无人机(UAV)形成的虚拟立体设置,每个无人机配备一个摄像头和一个惯性测量单元(IMU),利用它们的视图重叠和使用机载超宽带(UWB)模块之间的相对距离测量来实现协作VIO。特别地,我们提出了一种分散的协作估计方案,其中每个代理持有自
打开封面
下载高清视频
观看高清视频
视频下载器
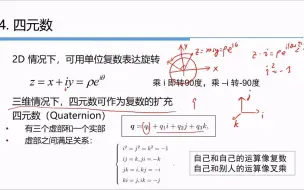
2-4 四元数
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
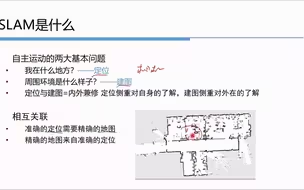
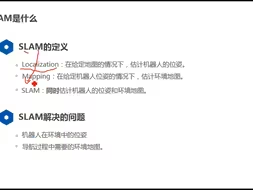
1-2 SLAM是什么
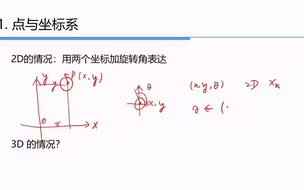
2-1 点与坐标系
5-1 特征点提取与匹配
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
【ICRA2021】3767-通过增量采样和概率路线图对动态环境进行自主UAV探索
1-1课程内容与预备知识
ORB_SLAM3实跑教程
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
【ICRA2021】3794-学习使用各种LiDAR配置进行无地图导航:一种基于支持点的方法
【SLAM】高翔-视觉SLAM十四讲 配套视频
【ICRA2021】3764-基于相对安全飞行走廊的动态环境中多旋翼机的在线轨迹规划
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
2-2 旋转矩阵
有缘人见
【ICRA2021】3714-How To Train Y our HERON
概率机器人
【ICRA2021】3756-远程类车车辆的触觉引导路径生成
【ICRA2021】3647-使用相对深度先验的偏振单目稠密建图
【ICRA2021】3745-SD DefSLAM:用于可变形和体内场景的半直接单目SLAM
【华南农业大学】激光视觉惯性SLAM建图 - 农业工程楼
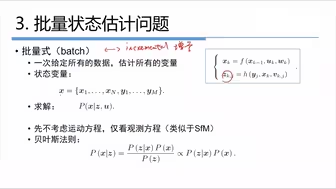
1-3 视觉SLAM的数学描述
第三届SLAM暑期学校
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
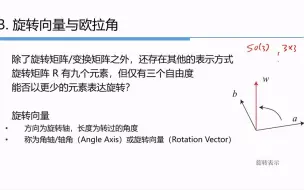
2-3 旋转向量和欧拉角
【ICRA2021】3731-用于大规模勘探任务的弹性高效激光雷达重建
1-4 Linux下的C++基础
3-1 群
有缘人见(上)
有缘人见(下)
2-5 实战环节
强推!【视觉SLAM十四讲】全书讲解!清华大学原著大佬高翔亲授!真的让人醍醐灌顶!——(人工智能、深度学习、神经网络、Pytorch、OpenAI开发者大会)
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!
A Compact LiDAR Odometry and Mapping with Dynamic Removal
OmniSLAM:宽基线多相机系统的全方向定位和稠密建图
【ICRA2021】3485-R-LOAM:利用已知三维参考对象的点到网格特征改进激光雷达里程计建图
【SLAM】LoopSplats:通过直接的3DGS注册,实现密集建图和在线回环检测的全局一致性图优化