V
主页
Orthrus: A Dual-arm Quadrupedal Robot for Mobile Manipulation and Entertainment
发布人
Presented herewith is another PAPRAS (Plug-And-Play Robotic Arm System) add-on system engineered to augment the functionalities of the quadrupedal robot, Boston Dynamics Spot. The system adeptly integrates two PAPRAS units onto the Spot, drawing inspiration from the mythological creature Orthrus—a two-headed dog in Greek mythology. Orthrus exhibits compatibility with diverse grippers and incorporates our software stack designed to facilitate seamless communication between Spot and PAPRAS. Our demonstration showcased diverse scenarios, encompassing mobile manipulation, entertainment applications, and human interaction. Sankalp Yamsani, Sean Taylor, Kazuki Shin, Jooyoung Hong, Dhruv Mathur, Kevin Gim, Joohyung Kim, “Orthrus: A Dual-arm Quadrupedal Robot for Mobile Manipulation and Entertainment Applications,” IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), August 2023 https://ieeexplore.ieee.org/document/10309339 video from https://www.youtube.com/watch?v=Yn3IxwAzN6o 欢迎关注,共同交流学习进步
打开封面
下载高清视频
观看高清视频
视频下载器
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
中国宇树Unitree G1 vs 波士顿动力Atlas 高性能人形机器人
SpotMini nimble robot by Boston Dynamics
Whole-body MPC for highly redundant legged manipulators
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
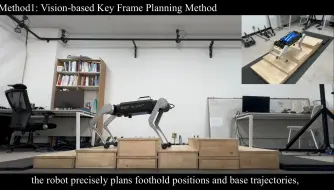
四足运动:用三种不同的方法在崎岖地形上行走
这美女机器人说一句最高性价比主播不过分吧
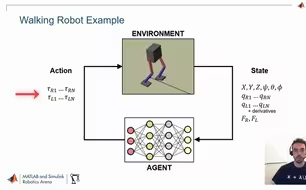
双足机器人步态生成 MATLAB and Simulink
人形机器人远程视觉操纵 论文和代码在简介
[RA-L 2020] Object Recognition, Contact Simulation, Detection, and Control
双足机器人的深度强化学习- MATLAB and Simulink
Learning whole-body manipulation for quadrupedal robot
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
上电驱?波士顿动力Atlas向液压说再见?不会再爱了!
2024世界机器人大会现场,开上“高达”了~
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
人形机器人腿部结构 基于 4DoF 球面并联机构
Dynamic Planning, forwards, backwards, and sideways on Stairs
波士顿动力 Marc Raibert 在2024世界机器人大会上的演讲《Making Robots Smarter》
四足机器人,机器狗,冬季远足与KAIST猎犬(完整版)
3D打印机器人执行器组件,在这个视频中,我展示了为我的四足机器人设计的机器人执行器的完整组装
北京2024世界机器人大会 美女机器人
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
这逼真程度?!差点把机器人当成我同事给牵走 | 暴走两万步挤进2024世界机器人大会上人最多的五个展厅
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
说点大实话!为什么我认为机器人“灵巧手”落地很难?
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
波士顿动力 MPC 控制策略的演进与思考
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
在俄乌战场大放异彩的机器狗!
通过优化理论指导设计双足以达到控制和任务的最优
Part 2 - How to Solve Inverse Kinematics of a 4 Leg Robot
震撼!国内加速进化人形机器人全面进化,夸张的机械素质让人目瞪口呆!#加速进化 #人形机器人 #国产机器人 #波士顿动力
[ ICRA 24 ]通过具有子目标预测的分层运动规划实现长远操控
Consensus Complementarity Control for Multi-Contact MPC
OpenAI投资的1X机器人NEO动作丝滑到让人分不出