V
主页
京东 11.11 红包
美国对我国科技发展打压限制的五件事,最近,AI领域频频上榜
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【2024最新】AI大模型入门教程(65集精讲)真正的保姆级零基础入门教程!深度学习基础+大模型相关算法+神经网络,大模型入门必学!
【全874集】目前B站最全最细的ChatGPT零基础全套教程,2024最新版,包含所有干货!一天就能从小白到大神!少走99%的弯路!存下吧!很难找全的!
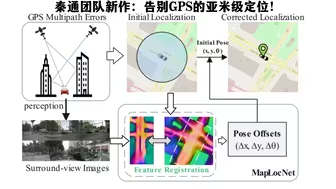
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
在人工智能技术领域, 中国与美国相比仍有较大差距!
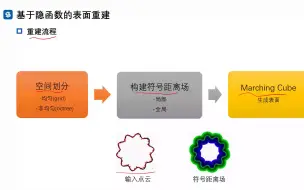
三维重建核心模块:表面重建方法
ICRA 2024 最佳学生论文奖 | NoMaD:基于Transformer用于 导航和探索的目标掩蔽扩散策略
SLAM在机器人与自动驾驶领域的从业探讨 | 圆桌论坛
这就是为何学习人工智能必学c++的理由
SLAM with Event-based Vision Sensors: Past, Present, and Future | 周易
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!
【全48集】目前B站最全最细的Llama3零基础全套教程,Llama3微调-量化-部署-应用实例解读七天就能从小白到大神!少走99%的弯路!存下吧!很难找全的!
LIO系统的改进及其在自动驾驶定位模块中的应用 | 高翔
移动机器人运动规划方法分类
【免费】自动驾驶仿真实践:Apollo&CARLA联合仿真: L1 Apollo架构
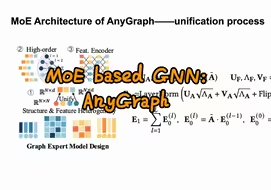
Graph领域的MoE:AnyGraph
口音与方言语音识别研究进展
更新后的gpt语音尴尬的笑
【附源码】毕设有救了!整整50套深度学习项目,算法原理+论文解读,比啃书强太多了!学完就能玩透人工智能!pytorch/机器学习/计算机视觉
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
基于GNN为群体机器人构建信息分享机制 (2772236)
提升四足机器人各种地形运动适应性的方法DTC(深度跟踪控制)
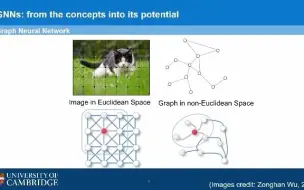
【动画解析】为什么神经网络可以学习任何东西?计算机博士精讲CNN/RNN/GAN/GNN/Transformer五大神经网络模型,深度学习入门必备!
大咖面对面:陈果果博士——智能语音专场
高翔SLAM报告:开阔高动态区域的激光融合定位
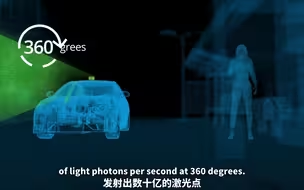
激光雷达点云采集原理以及在自动驾驶中的应用(中文字幕)
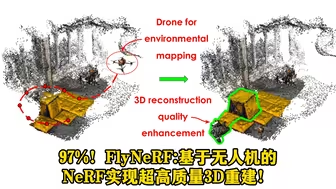
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
无视干扰,谷歌开源SpotlessSplats:3D场景重建中的干扰物识别与排除
渗透进生活细微处的机器人,世界各国纷纷参与机器人赋能!
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
StreamPETR—作分享:稀疏向量化表征长时序建模
迄今为止最强的多Agent开发框架-Swarm
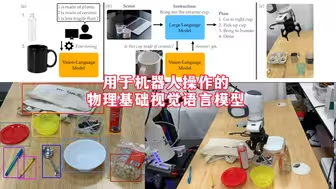
3.96万条众包和41.7万条自动化 的物理概念标注,助力VLMs突破 让机器人像人类一样理解物理世界
论文鉴赏:斯坦福大佬领衔之作, GRM:用于高效三维重建和 生成的大型高斯重建模型
半正定规划实用指南(2)
第四次工业革命已悄然兴起,那么它的标志性产业会是什么呢?
面向自动驾驶和盲人辅助的场景分割-杨恺伦/湖南大学副教授
这才是科研人该学的【时间序列预测模型】教程,一口气学完LSTM、Informer、ARIMA、Pandas、Transformer!通俗易懂!机器学习|深度学习
清华叉院、理想提出DriveVLM,视觉大语言模型与自动驾驶融合,以提升自动驾驶能力
新品上市!逐际动力发售首款多形态双足机器人TRON 1