V
主页
京东 11.11 红包
第四次工业革命已悄然兴起,那么它的标志性产业会是什么呢?
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
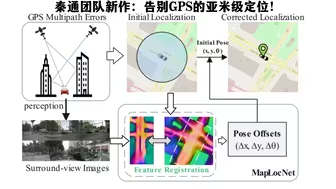
IROS24新作 | 上交大秦通团队,MapLocNet:实现自动驾驶新突破 告别GPS的亚米级定位!
ECCV'24 | Gaussian Grouping解决3DGS的对象级场景理解问题,实现3D场景任意分割和编辑
多模态响应与功能集成,华中科技大学微型磁控胶囊机器人登上《Nature Communications》
李飞飞团队佳作不断:聚焦机器人抓取交互,让机器人操作真正地适应各种环境
即将开课 | 『ROS理论与实践(以移动机器人为例)』
迄今为止最逼真的人形机器人Ameca
Science Robotics 香港城市大学与香港科技大学开发了具有协同混合运动的敏捷单足跳跃四轴飞行器
Science杂志封面:控制软腿机器人的无电子气动电路
ECCV'24 | JHU提出无需SfM的X光3DGS技术: X-Gaussian,使得X射线新视图合成推理速度提升73倍!
多模态信息感知的SLAM | 吴毅红
机器人顶级期刊RA-L2023年 Best Paper "H2 Mapping:使用 分层混合表示的实时密集建图"
基于深度学习的三维重建与位姿估计系统设计 | 孙佳明
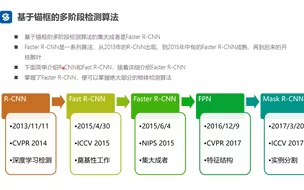
R-CNN及Fast RCNN目标检测算法
Petoi袖珍机器狗Bittle~size能装进口袋里
ETH最新!CVPR | 2024NeLF-Pro:用于多尺度新视图合成的神经光场探针,一个方法解决多种规模场景的快速渲染重建
直观理解Transformer中的Attention机制
第一个利用GPT-4V在现实场景中进行开放式推理和自适应规划的闭环框架: COME-robot
会跑会跳四足机器人ALPHRED2!
国际无人机编舞比赛【第一名作品展示】
2024最火的两个模型:Informer+LSTM两大时间序列预测模型,论文精读+代码复现,通俗易懂!——人工智能|AI|机器学习|深度学习
CVPR2024 | 一统所有目标感知任务,华科&字节提出感知模型GLEE,一次性解决图像和视频中的几乎所有目标感知任务
《机器学习数学基础》 第4章 01:信息论基础概念—熵
深蓝学院&元戎启行:听大佬聊自动驾驶
ACM SIGGRAPH Asia 2024 | RobotMDM:机器人运动扩散模型:机器人角色的运动生成
Waymo研发经理|自动驾驶感知前沿技术介绍
nuPlan:世界上首个现实世界自动驾驶数据集和基准,旨在测试基于机器学习的规划器处理各种驾驶场景以及做出安全且高效决策的能力
港科大开源,实现让图像算法稳定处理视频!
ECCV'24 Oral | 王东林团队提出PiTe:时空对齐视频大模型,增强视频语义理解,提升视频语言模型性能!
来自中科院关于3DGS进展的最新综述,该团队的本次调查旨在帮助初学者快速进入该领域,并为经验丰富的研究人员提供全面的概述
逆天!免费用GPT-4o的网站,白嫖就是赚到!
SLAM with Event-based Vision Sensors: Past, Present, and Future | 周易
移动机器人运动规划
【精选】人工智能课程:揭秘深度学习Transformer模型原理及优化策略!AI算法工程师面试必备知识点!transformer从零详细解读 模型实战 代码详解
「Github一周热点46期」大模型OCR、IPTV直播源、工作流程自动化、下一代信息浏览器和下载金融数据工具
第三届全国SLAM技术论坛 | 开幕致辞
被2018年图灵奖得主Yann LeCun主动宣传的从文生连环画的生成模型,StoryDiffusion:用于长距离 图像和视频生成的一致性自注意力
六维物体位姿估计与追踪:从实例级到类别级
西部世界即将成为现实,仿生义体有着落了
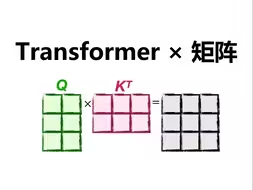
【中英双语】ChatGPT背后的数学原理是什么?带你看懂Transformer模型的数学矩阵实现!
NeRF在机器人技术中 应用的最新综述,旨在为 该领域提供重要参考指南