V
主页
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
发布人
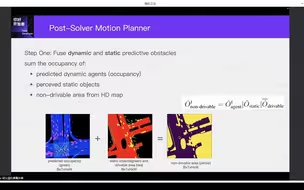
论文链接:https://arxiv.org/pdf/2301.05393 自动驾驶汽车必须与其他驾驶员共享驾驶空间,并经常采用保守的运动规划策略以确保安全。这些保守策略会对自动驾驶的性能产生负面影响,并显著降低流量吞吐量。因此,为了避免保守,我们为自动驾驶车辆设计了一个交互感知运动规划器,它与周围车辆交互,以局部最优的方式执行复杂机动。我们的规划器使用基于神经网络的交互式轨迹预测器,并将其与模型预测控制(MPC)进行分析集成。使用交替方向乘数法(ADMM)求解MPC优化,并证明了算法的收敛性。我们提供了一项实证研究,并将我们的方法与基线启发式方法进行了比较。
打开封面
下载高清视频
观看高清视频
视频下载器
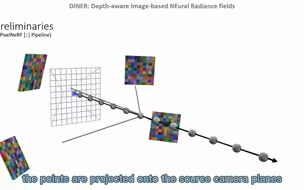
CVPR 2023 | DINER: 基于深度感知图像的神经辐射场
为自动驾驶构建城市规模的神经辐射场
一文尽览:自动驾驶大语言模型应用综述分享
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
轨迹规划新方案!基于差分平坦度的自动驾驶车辆轨迹规划
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
自动驾驶安全的关键!| 轨迹预测中的经典模型大盘点
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
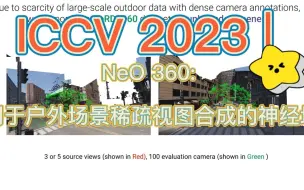
ICCV 2023 | NeO 360: 用于户外场景稀疏视图合成的神经场
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
端到端基础!绕不开的感知模块
【手搓代码】搓一套简单的自己喜欢的无人机规划控制代码
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
自动驾驶规划控制的未来是什么?
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
最新!如何使用深度强化学习在未知环境中进行导航?
ICCV 2023 | CVRecon:重新思考神经重建中三维几何特征学习
ICRA2023 | 激光雷达相机内外参联合标定方案!
自动驾驶中运动规划及控制的主要问题都有哪些?如何快速入门?
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
毫米波雷达视觉算法CRAFT,这次彻底理解了!
车辆轨迹有多少种玩儿法?CitySim数据集:轨迹预测、仿真、数字孪生应有尽有!
基于深度学习的自动驾驶控制模拟(复现钱彬csdn播客)
L4自动驾驶感知的终极形态会是协同感知吗?UCLA顶级博士告诉你答案!
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
讲明白了!端到端算法评估指标详解
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
大模型时代下的端到端自动驾驶(上篇)
渲染速度提高5倍!GaussianOcc:借助3D GS,没有标注也能做Occ(东京大学)
【CVPR 2024】鉴智机器人算法大佬揭秘3D场景流估计的最新工作——3DSFlabelling
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
透彻!特斯拉occupancy network详解