V
主页
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
发布人
https://www.youtube.com/watch?v=SvfVNQ90k_w&list=WL&index=8 Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jumping Guillaume Bellegarda, Milad Shafiee, Merih Ekin Özberk, Auke Ijspeert Legged robots are becoming increasingly agile in exhibiting dynamic behaviors such as running and jumping. Usually, such behaviors are either optimized and engineered offline (i.e. the behavior is designed for before it is needed), either through model-based trajectory optimization, or through deep learning-based methods involving millions of timesteps of simulation interactions. Notably, such offline-designed locomotion controllers cannot perfectly model the true dynamics of the system, such as the motor dynamics. In contrast, in this paper, we consider a quadruped jumping task that we rapidly optimize online. We design foot force profiles parameterized by only a few parameters which we optimize for directly on hardware with Bayesian Optimization. The force profiles are tracked at the joint level, and added to Cartesian PD impedance control and Virtual Model Control to stabilize the jumping motions. After optimization, which takes only a handful of jumps, we show that this control architecture is capable of diverse and omnidirectional jumps including forward, lateral, and twist (turning) jumps, even on uneven terrain, enabling the Unitree Go1 quadruped to jump 0.5 m high, 0.5 m forward, and jump-turn over 2 rad. Video results can be found at this https URL. paper link: https://arxiv.org/abs/2403.06954
打开封面
下载高清视频
观看高清视频
视频下载器
波士顿动力机器人可以完全自动工作了
通过优化理论指导设计双足以达到控制和任务的最优
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
双足机器人步态生成 MATLAB and Simulink
人形机器人足底机械结构设计
人形机器人腿部机械结构设计 !很简单,有手就行!论文在简介
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
SOTA ! 浙大最新成果!四足强化学习走梅花桩!
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
人形机器人腿部结构 基于 4DoF 球面并联机构
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
人工肌肉驱动的人形机器人|2024【Clone】
开源控制器Baselinewalkingcontroller:双足机器人平地动态行走
原声纯享版,姐姐今天讲SQL 里面Having的用法,快来签到叭|《SQL》第7节
鸟类和变形翼无人机的灵活栖息动作 | 2024 洛桑联邦理工大学
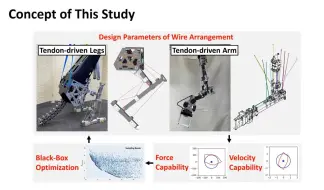
(RA-L 2024) Design Optimization of Wire Arrangement for Tendon-driven Robots
完整的狗来啦
通过对抗运动先验学习四足机器人的双足行走
仿真人形机器人
MPC and RL, two different roads to legged locomotion, and that's OK
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
人形机器人灵巧手臂最新成果
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
Humanoid Self-Collision Avoidance Using Whole-Body Control with CBF
Decaying Action Priors for Accelerated Imitation Learning of Torque-Based Legged
[23 RAL]利用实时非线性 MPC 实现双足运动的无缝反应策略
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
(ICRA 2024) 腹腔镜手术基础的模仿学习
音乐恐怖,吓倒Spot狗狗了 波士顿动力 万圣节
(RA-L 23) Reactive Landing Controller for Quadruped Robots
(Humanoids 22)半人马机器人爬上 0.3 m 的平台,手臂上承载 17 kg 的有效负载
RA-L 24浙大最新成果Parkour with Implicit-Explicit Learning Framework for Legged Robots
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
Bipedal Safe Navigation over Uncertain Rough Terrain
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged