V
主页
仿真到底仿了个啥?你真的懂Carla了吗!详解仿真大招如何安装与启动?
发布人
视频出自自动驾驶之心平台《Carla-Autoware联合仿真实战》:https://wrzpl.xetslk.com/s/1mVJYs
打开封面
下载高清视频
观看高清视频
视频下载器
【行业内幕】百度的技术路径 永远不可能赢亏平衡 自动驾驶抢出租车司机饭碗 还早8至10年 | LI道长的世界观48
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!
轨迹预测到底预测个啥???轨迹预测入门必备!
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
Segment Anything之后,分割的路在何方?
逆天了!基于分层3D高斯表示的超大数据集实时渲染(SIGGRAPH 2024)
闭环驾驶SOTA!CarLLaVA: CARLA自动驾驶挑战赛2.0第一名方案!
BEVCar:SOTA!RV融合完成地图和分割双任务
OPPO和港中文大学推出GlyphDraw2,多文字海报生成如此简单!使用扩散模型和LLM自动生成复杂字形海报的端到端方案
大疆 CVPR 2024 | AFNet自动驾驶中单视图和多视图深度的自适应融合
端到端趋势下,传统规控还有未来么?
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
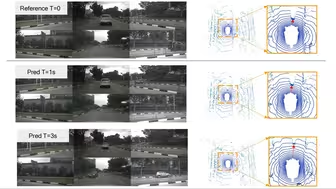
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
什么是端到端自动驾驶?什么是基础world model?
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
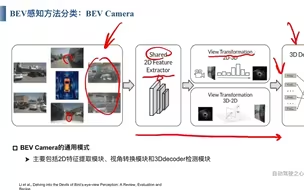
纯视觉/多传感器融合方案!BEV感知方法分类
经验之谈,轨迹预测真正重要的是什么?
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
太详细了!多传感器融合的策略和方法
无人驾驶萝卜快跑投入武汉市场后,好消息:超雄司机少了,坏消息:超雄才乘客变多了!机器学习|深度学习|计算机视觉
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
是时候总结一下过去这一年了!看看他们在自动驾驶之心分享了什么
World Model!世界模型,迈向自主机器智能时代!城市场景下的世界模型算法—MILE
自动驾驶如何学好C++?
透彻!特斯拉occupancy network详解
直接干到未来!Wayve的GAIA-1世界模型到底是个啥?
深度学习调参有哪些技巧?
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
大型纪录片《萝卜快跑》!!!
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
大火的BEVFusion算法详解
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
数据为王!自动驾驶开源数据体系现状与未来
使用YOLOv4完成激光雷达点云下的3D目标检测!
牛的!大佬是如何几分钟聊透时空联合规划框架的?
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
一窥大神们与中国智驾的这些年,入局智能驾驶汽车领域的12大企业的技术灵魂人物#端到端#人工智能#自动驾驶#智能驾驶#BEV感知#车载
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解