V
主页
闭环驾驶SOTA!CarLLaVA: CARLA自动驾驶挑战赛2.0第一名方案!
发布人
链接地址:https://arxiv.org/pdf/2406.10165 在这份技术报告中,介绍了CarLLaVA,这是一个用于自动驾驶的视觉语言模型(VLM),专为CARLA自动驾驶挑战赛2.0开发。CarLLaVA利用LLaVA VLM的视觉编码器和LLaMA架构作为骨干,仅通过摄像头输入即可实现最先进的闭环驾驶性能,无需复杂或昂贵的标签。此外,展示了在驾驶输出之外预测语言评论的初步结果。CarLLaVA采用半分解的输出表示,同时预测路径和航点,从而获得路径的优势,以实现更好的横向控制,以及航点的优势,以实现更好的纵向控制。提出了一种高效的训练方法,在大型驾驶数据集上进行训练,避免浪费在简单或琐碎数据上的计算资源。CarLLaVA在CARLA自动驾驶挑战赛2.0的传感器赛道中排名第一,在性能上超过先前的最先进水平458%,并超过最佳的竞争性提交结果32.6%。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
自动驾驶中的多传感器融合状态估计如何建模?
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
Tesla FSD V13前瞻!
端到端自动驾驶:SparseDrive 算法详解
【深信科创联合制作】仿真数据的一百种玩法 | 基于Carla传感器的仿真数据增强实战来了!
基于深度学习的自动驾驶控制模拟(复现钱彬csdn播客)
什么是端到端自动驾驶?什么是基础world model?
分类突破!自动驾驶中的Occupancy感知方法分类
智驾大赛智界R7城市复杂路况表现!最复杂城市环境智驾表现,智驾第一梯队各显身手 #国产车现在属于什么水平 #第一智驾 #民间智驾挑战赛#华为Ads #智界R7
室外智能驾驶挑战赛
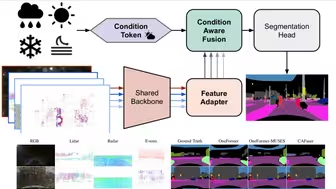
ETH新作CAFuser:条件 感知多模态融合 ,实现对 驾驶场景的稳健语义感知,多个下游任务SOTA!
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
CUDA编程实战教程之:流和事件!彻底搞懂~
大火的BEVFusion算法详解
小米NOA HyperOS 1.4.0复杂路况测试,48分钟完整版
ICCV2023 | MPOT:多平面目标跟踪
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
讲明白了!端到端算法评估指标详解
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
史上最全!一次性梳理自动驾驶鲁棒性研究
【NeurIPS 2023】自动驾驶多模态感知蒸馏新方案来了!
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
大型SUV市场新玩家,问界M9和理想L9强劲对手?抢先实拍腾势N9
高精地图制作关键技术及领域主流方案分享-part1
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
自动驾驶规划控制的未来是什么?
多传感器融合!BEV感知融合算法介绍
小鹏P7+纯视觉能比得过激光雷达吗?一个视频看懂!
大模型时代下的端到端自动驾驶(上篇)
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
登顶Nature!带事件摄像机的低延迟自动驾驶视觉新方案!
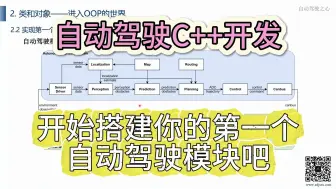
如何从零搭建自己的自动驾驶C++功能模块?
小鹏P7+车位到车位智驾抢先测!地库、园区全打通!这才是第一梯队?
拆解理想L9自动驾驶控制器。整车产品虽好,但是自动驾驶控制器可靠性不高!
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
乐道L60日常出行表现-高速
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)