V
主页
World Model!世界模型,迈向自主机器智能时代!城市场景下的世界模型算法—MILE
发布人
视频出自国内首个自动驾驶与世界模型论文带读教程:https://wrzpl.xetslk.com/s/2glnjL 欢迎关注【自动驾驶之心】公众号,干货资讯第一时间到达。 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) 1、国内首个基于Transformer的分割检测➕视觉大模型课 2、Occupancy从入门到精通全栈课程(理论➕实战) 3、自动驾驶中的多传感器融合与目标跟踪(从入门到精通) 4、国内首个多模态3D目标检测全栈教程(前融合/特征级融合/后融合) 5、YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 6、国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) 7、多传感器融合中的毫米波雷达-视觉融合感知全栈教程 8、Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 9、模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 10、规划控制理论&实战课程:PID、LQR、MPC全掌握 11、国内首个工业级车道线检测课程,从单目2D、单目3D到BEV车道线!!! 12、国内首门面向量产的单目3D与单目BEV感知教程!!! 13、Nerf与自动驾驶论文带读课程!!! 14、轨迹预测理论+实战教程!!! 15、轨迹预测与自动驾驶论文带读课程!!! 16、点云3D目标检测理论与实战教程!!! 17、国内首门毫米波&4D毫米波雷达理论实战教程!!! 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。
打开封面
下载高清视频
观看高清视频
视频下载器
World Model!大火的世界模型到底是什么?
什么是端到端自动驾驶?什么是基础world model?
特斯拉的World Model是什么?怎么做端到端训练?
以特斯拉为案例:自动驾驶仿真框架分析(上,数据搭建/场景建模)
聊一聊4D成像雷达在辅助驾驶领域的应用
南洋理工大学博士分享!规模化可学习与交互式的自动驾驶决策系统如何构建?
世界模型!特斯拉CVPR2023 Workshop!
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
B站强推!2024公认最通俗易懂的【AI大模型】教程,24集付费课程(附资料)LLM大模型_RAG_大模型微调_多模态
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
看看顶级大佬如何梳理L2++决策算法的演进-上
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
LLM+自动驾驶还有什么搞头?LLM驱动的智能体应用探析!
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
在线高精地图与城市NOA是什么关系?为什么如此重要?
数据太逼真了!DriveDreamer:走向真实世界驱动的自动驾驶世界模型
ITSC2023 | LimSim:长期可交互多场景交通仿真器
『汽车人有话说』试驾都要排队的小米,自动驾驶到底行不行
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
【全网首讲】大佬开讲:我们是否走在开环端到端自动驾驶正确的道路上?
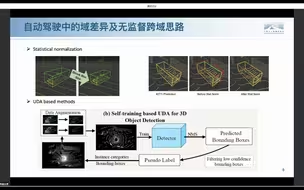
内卷时代如何降低自动驾驶数据的标注成本?双域主动学习可能是答案!
登顶Nature!带事件摄像机的低延迟自动驾驶视觉新方案!
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
自动驾驶仿真框架CARLA教程(1):用Carla和Python编程自动驾驶汽车
直接制霸天空!ICRA’24 最新基于强化学习的MPC算法,苏黎世大学出品!
速度提高60倍!重建你的自动驾驶场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)
博士生每天科研时间是多久?
Nerf+SLAM会擦出什么样的火花?
大火的ChatGPT在自动驾驶与OpenAI上的应用
城市NOA行不行?聊一聊在线高精地图的边界!
自动驾驶中运动规划及控制的主要问题都有哪些?如何快速入门?
最新!如何使用深度强化学习在未知环境中进行导航?
冒死上传!花9880买来的【智慧交通】企业级项目实战教程,全程精细讲解!核心知识点统统给你讲明白!赶紧收藏码住!
Segment Any Point Cloud:运用视觉基础模型分割一切点云
【CVPR2023】 自动驾驶场景下理解BEV目标检测的鲁棒性
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
端到端趋势下,传统规控还有未来么?
Corner Case不可怕!自动驾驶Corner Case可控生成系统性解决方案来优化!
英伟达最新!Cube-LLM:通过视觉语言模型,真正感知3D世界