V
主页
ICRA2021 | 多相机激光雷达的外参标定(基于目标姿态估计)
发布人
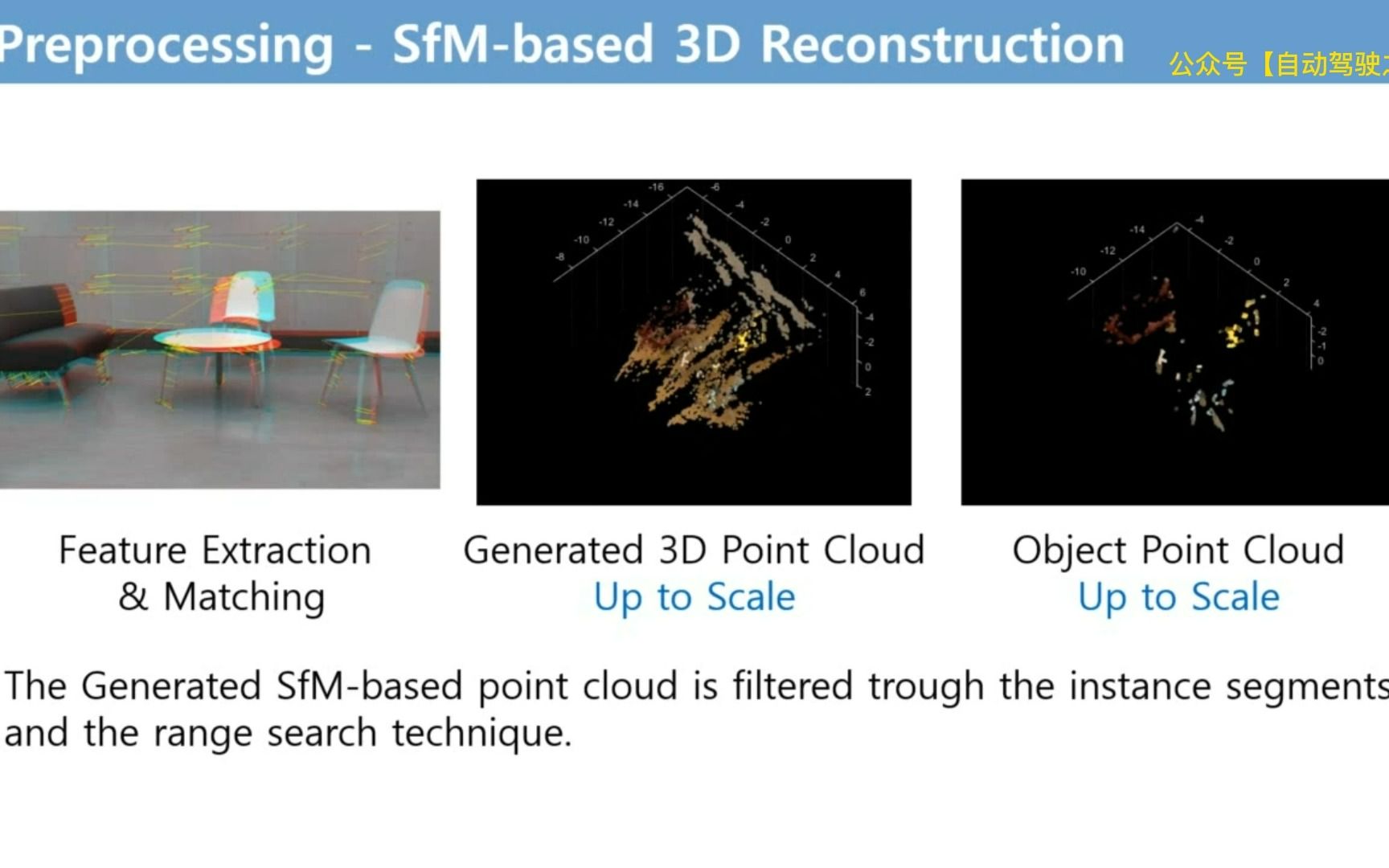
论文题目:Targetless Multiple Camera LiDAR Extrinsic Calibration using Object Pose Estimation
打开封面
下载高清视频
观看高清视频
视频下载器
在线高精地图与城市NOA是什么关系?为什么如此重要?
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
搞懂了!原来激光雷达和相机的内外参是这样标定的
超详细!BEV感知算法的应用介绍
从0到1!彻底搞懂BEVFormer算法原理
量产经验分享:如何提升相机标定的精度?
ICRA2023 | 激光雷达相机内外参联合标定方案!
大火的BEVFusion算法详解
传感器标定精度如何验证?(Lidar/Camera/Radar/IMU/鱼眼相机)
醍醐灌顶!如何快速上手激光雷达-惯导标定?
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
什么是端到端自动驾驶?什么是基础world model?
Nuscenes、KITTI等多个BEV开源数据集介绍!
史上最全 | 自动驾驶中的多传感器标定校准(Lidra/Radar/Camera/Stereo/IMU等)
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
研究生必学!目前B站最好的【三维重建】教程,15小时深入浅出SfM与SLAM核心算法!计算机视觉3D三维重建/摄像机几何/多视图几何
33款热门车型主动安全测试,有些车的激光雷达就是摆设?
自动驾驶仿真框架CARLA教程(6):Longer-term model results
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
彩电大沙发+激光雷达,15.58万起售的零跑C16有点东西
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
毫米波雷达视觉算法CRAFT,这次彻底理解了!
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
CVPR 2023 | 通过点云预测作为4D Occupancy 预测的代理
鱼眼相机和超声波雷达是怎么做融合的?
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
分类突破!自动驾驶中的Occupancy感知方法分类
第二次试驾昊铂HT 24款激光雷达版,红绿灯左转,避让路边临停车辆以及行人三轮车,非常丝滑
自动驾驶多传感器数据融合(3):单目标跟踪算法
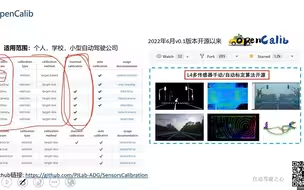
OpenCalib应用场景介绍
看到了这个视频,彻底搞懂了PETR算法!
自动驾驶中的多传感器融合状态估计如何建模?
昨天试驾了昊铂GT 24款激光雷达版,无图NDA也很牛逼,接近昊铂HT的24款智驾水平,没有高精地图的乡间小路一样老溜了。
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
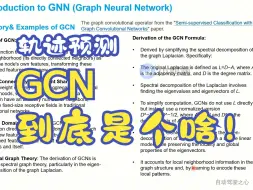
轨迹预测的GCN是个啥???大佬详解GCN理论&代码
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架