V
主页
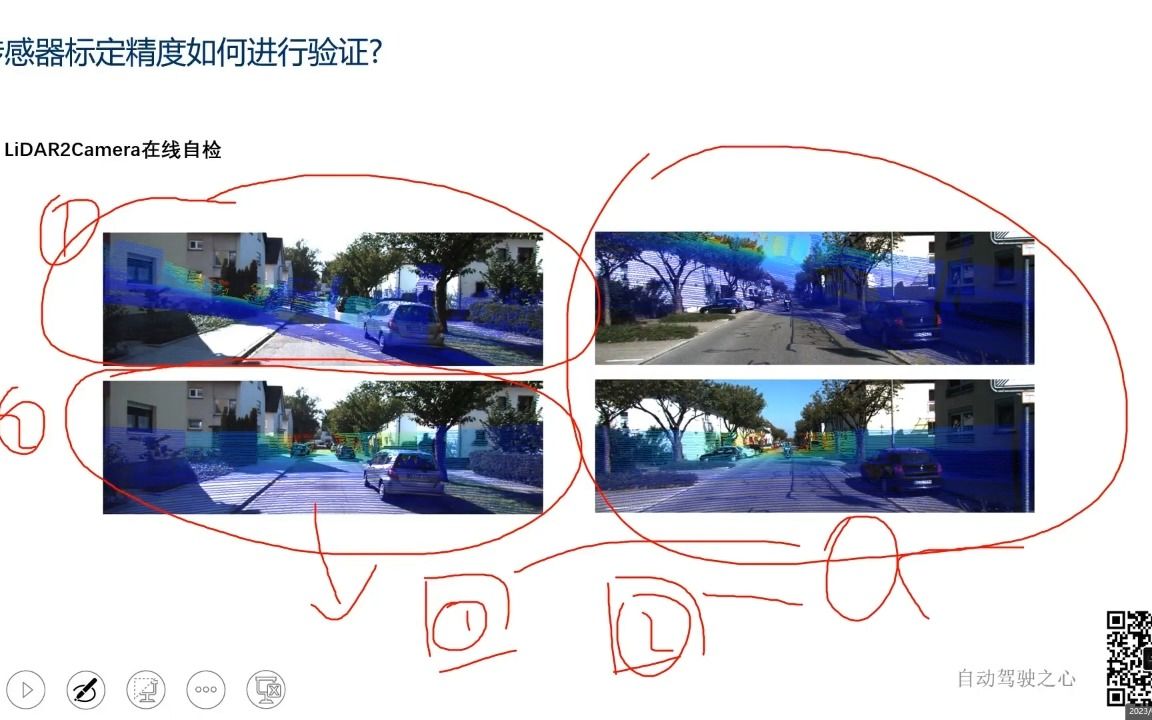
传感器标定精度如何验证?(Lidar/Camera/Radar/IMU/鱼眼相机)
发布人
国内首个多传感器标定系统教程,针对相机内参标定、标定精度优化、传感器到车体标定、Lidar/Radar/IMU/Camera多传感器之间离线标定/在线标定、鱼眼与环视相机标定等20+标定方案展开了详细算法讲解与代码实现,适合感知、标定等算法工程人员从0到1的学习!学习链接:https://gsf.xet.tech/s/dpYnP,小助理微信AIDriver004
打开封面
下载高清视频
观看高清视频
视频下载器
超详细的激光雷达相机标定教程!(Lidar-Camera)
实战超详细!Radar、Lidar和前置Camera的标定
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
多传感器标定的工具箱有哪些?
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
量产经验分享:如何提升相机标定的精度?
搞懂了!原来激光雷达和相机的内外参是这样标定的
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
支持在线时空标定!高效多传感器辅助惯性导航系统(ICRA2021)
超越Lidar?聊一下4D Radar在自动驾驶中的优势和应用!
太详细了!多传感器融合的策略和方法
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
Nerf+SLAM会擦出什么样的火花?
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
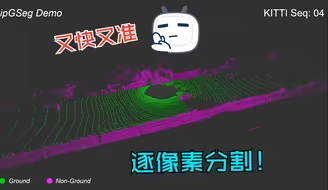
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
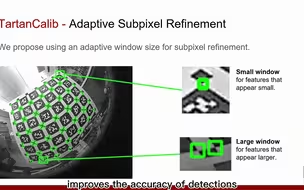
开源广角相机标定!TartanCalib:基于AprilTags自适应亚像素细化的迭代广角镜头标定(卡内基梅隆大学)
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第3节:车路协同场景激光雷达部署策略优化方法
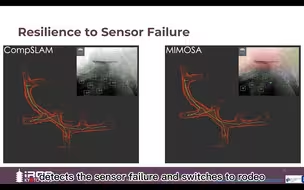
【IROS 2022】多模态SLAM框架MIMOSA:一种针对传感器退化的弹性自治多模态SLAM框架
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
高精地图制作关键技术及领域主流方案分享-part1
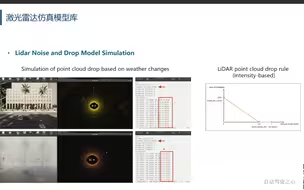
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第2节:高一致性传感器仿真模型库
SLAMesh: 基于Mesh地图的实时LiDAR定位与Mesh建图方法分享
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
视觉SLAM VIO开源代码解析
端到端算法是什么?自动驾驶领域是怎么做的?
M-LIO:提升传感器信号丢失容忍度的多激光雷达和多IMU里程计
毫米波雷达视觉算法CRAFT,这次彻底理解了!
什么是端到端自动驾驶?什么是基础world model?
最新!如何使用深度强化学习在未知环境中进行导航?
如何从手持SLAM数据到MESH网格
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM