V
主页
京东 11.11 红包
02 pixhawk硬件原理图讲解
发布人
手把手教你使用stm32 cube mx 在pixhawk上写飞控代码 视频教程
打开封面
下载高清视频
观看高清视频
视频下载器
第三课3.1 硬件DIY
04 飞控算法基础之卡尔曼滤波
04 串口通信
从零开始制作四旋翼无人机 EP1 - 硬件原理图与PCB介绍
3.2 飞控算法基础之PID控制_2
组合导航基础知识-飞控位置估计
03 飞控算法基础之PID控制
飞控教程第16课 pixhawk位置估计互补滤波算法解读
国产飞控数传电台TP5606无人机30公里超远距离模块
【飞控开箱】Holybro Pixhawk 6C开箱
08 数据处理-陀螺仪数据
飞控姿态解算算法
从零开始制作四旋翼无人机 EP0 - 项目整体思路介绍
02 freertos基础与LED控制
18 飞控控制器结构解读
其实,机械风口行业已经很明显了!新能源、医疗、农业行业大爆发,未来5年机械专业贼吃香...
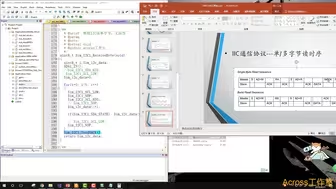
14 双机通信
10.3 GPS读取代码解读
〖T.O.P.〗“手搓”飞控加电调“开源”,用山鹰科技方案实现穿越机飞塔自由
8.1 hmc5883介绍
07 数据预处理-IMU数据滤波_2
10 姿态解算_1
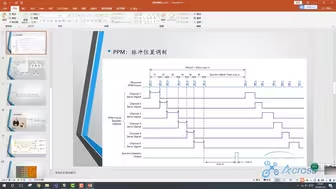
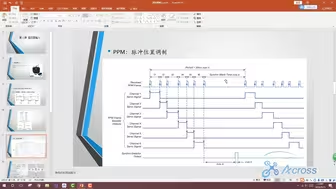
11.2 PPM SBUS 代码解析
【自制】F405飞控(开发记录)
新手向简飞代码教程
8.2 I2C软件模拟编程
[inav]固定翼垂起(VTOL)参数设置教程
09 ringbuffer环形队列
22 地磁校准程序以及flash保存参数功能的C代码实现
11.1 遥控器协议PPM SBUS简介
【8K|杜比全景声】纪录片《飞来峰》
这飞控有何不同?详解Speedybee F405 40A AIO
05 MPU6000 IMU传感器数据读取
固定翼航模新手系列教程1-飞控刷固件
06 数据预处理-IMU数据滤波_1
SW材质库你想要嘛吗?超全材质库分享及设置流程讲解!
17 高度估计matlab仿真
3.1 飞控算法基础之PID控制_1
13 姿态解算_4
19 姿态估计的C代码实现