V
主页
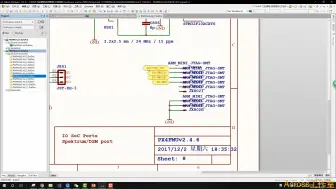
第三课3.1 硬件DIY
发布人
手把手教你使用stm32 cube mx 在pixhawk上写飞控代码 视频教程
打开封面
下载高清视频
观看高清视频
视频下载器
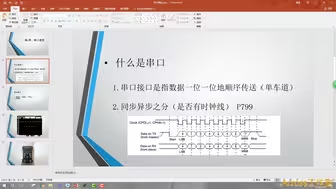
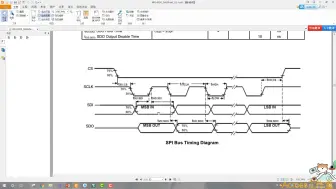
04 串口通信
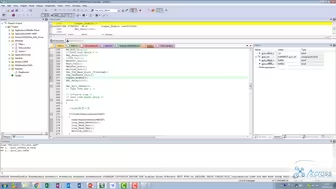
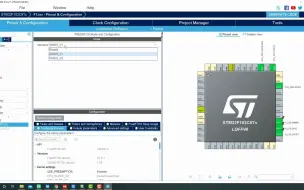
01 开发环境准备
备考2025一建机电精讲王峰【完整最新】
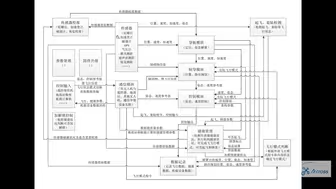
飞控姿态解算算法
组合导航基础知识-飞控位置估计
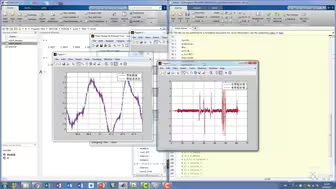
08 数据处理-陀螺仪数据
3.2 飞控算法基础之PID控制_2
飞控教程第16课 pixhawk位置估计互补滤波算法解读
仿生蜻蜓飞控理论概述
F405 V3飞控如何焊模拟图传和摄像头
07 数据预处理-IMU数据滤波_2
3.1 硬件DIY
01 飞控软件概要
让LEGO飞
05 MPU6000 IMU传感器数据读取
20 控制器的C代码实现
教你组装SpeedyBee F405 Wing Mini
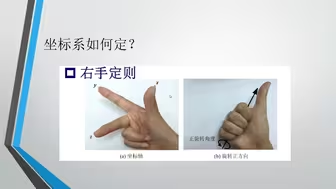
05 姿态解算基础-坐标系 欧拉角 四元数概念
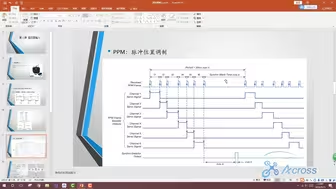
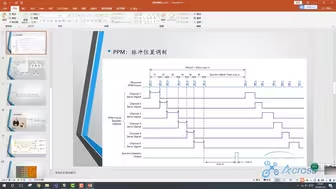
11.1 遥控器协议PPM SBUS简介
06 数据预处理-IMU数据滤波_1
10 姿态解算_1
22 地磁校准程序以及flash保存参数功能的C代码实现
【考前聚焦】民法2小时(全科串讲 名师带划重点!)
C919内部结构什么样?3D动画演示
11 姿态解算_2
10.1 GNSS介绍
MBTI排行榜大全
11.2 PPM SBUS 代码解析
10.3 GPS读取代码解读
02 freertos基础与LED控制
学习效率低?你可能犯了这五大错误!
8.2 I2C软件模拟编程
X6开源飞控打造50kg级四轴八桨共轴无人机,具备GNSS抗干扰与抗诱骗功能
毕业大论文第一章绪论怎么写,视频简介有模板
10.2 GPS 手册解读及上位机控制方式
3.1 飞控算法基础之PID控制_1
7.2 MS5611编码
8.1 hmc5883介绍
14 姿态解算_5
21 飞行模式、状态机、控制器调度的C代码实现