V
主页
自动驾驶中的多维感知融合技术分享(Camera+Liar+Radar+IMU)
发布人
主题大纲: 1、自动驾驶感知模块概括; 2、自动驾驶中的多传感器数据融合技术栈; 3、多传感器融合岗位与前(钱)景; 4、如何学习多传感器融合技术以及进阶路线。 5、答疑互动; 主讲介绍: 主要来自北航、东南大学、清华大学等知名高校硕士,深耕自动驾驶领域,曾就职于华为、云从科技等知名公司,涉及感知融合,激光SLAM,视觉SLAM,传感器标定等方向,具有丰富的理论知识和工程实践经验。 小助理微信:CV_LAB
打开封面
下载高清视频
观看高清视频
视频下载器
06 自动驾驶中实战基础之3D-2D求解方法(PnP系列)[Camera + LiDAR + Radar + IMU]
大作业|激光-视觉-IMU-GPS融合SLAM算法
最新!无人机动态环境感知&规划新思路!
广汽冯兴亚谈传统车企出卖灵魂论:自动驾驶技术现在已不是灵魂
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(中篇)
车祸前0.1秒退出智驾?致敬0.1秒手速合集
自动驾驶中实战课之Lidar与IMU的同步实战
03 自动驾驶中多传感器同步理论(Camera + LiDAR + Radar + IMU)(上篇)
极快跟踪一切!DOT:无惧遮挡!
EagerMOT,通过传感器融合进行3D多目标跟踪(ICRA2021)
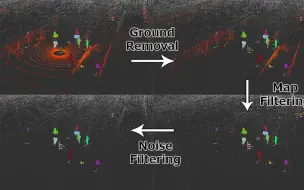
【自动驾驶实践】多激光雷达实车安装&外参标定&拼接预处理
爱丁堡大学!雨雪无阻|毫米波成像雷达赋予具身智能鲁棒的空间感知(上篇)
自动驾驶中常用传感器硬件介绍
自动驾驶中多个小视场固态激光雷达不依赖参照物的外参标定(代码即将开源)
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
04 自动驾驶中多传感器信息融合理论(上篇)(Camera + LiDAR + Radar + IMU)(三)
05 自动驾驶中多传感器信息融合理论(下篇)(Camera + LiDAR + Radar + IMU)
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
02 自动驾驶中常用传感器硬件介绍(Camera + LiDAR + Radar + IMU)(中篇)
来自牛津大学最新论文,统一的多模态地标跟踪,用于紧密耦合激光雷达-视觉-惯性里程计
MA-LIO:使用逐点 LiDAR 间不确定性传播的异步多LiDAR 惯性里程计
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
小米su7max全国NOA智驾,三分钟不到差点撞墙,太危险了!
小雷达的用法
Occupancy占用网络的多维应用探究
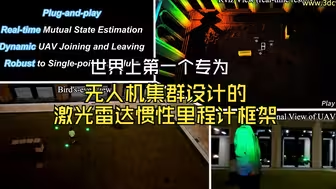
世界上第一个专为无人机集群设计的激光雷达惯性里程计框架
最新英伟达自动驾驶测试demo,包含距离感知、交通标志检测、运动估计、多相机特征跟踪、以及停车位检测等多项功能
ICRA2021,OmniDet:用于自动驾驶的基于环视摄像头的多任务视觉感知网络
香港大学火星实验室:无人机利用机载电脑感知计算躲避动态障碍物
清华大学:OcclusionFusion:遮挡感知运动估计的实时动态3D重建
ICRA23开源 动态环境下高鲁棒的雷达MOT SLAM!
3D体感控制器Leap Motion,使用红外LED+灰阶camera的方式实时采集手部数据
重磅开源!连你的微表情都可以轻松还原!SMIRK超强3D面部重建技术!
CVPR2024开源NetTrack:跟踪高动态物体!
基于深度学习的自动驾驶控制模拟(复现钱彬csdn播客)
【RM】一方水土养一方人~
厦门大学:使用可穿戴 IMU和LiDAR的大规模室内外4D场景捕获
只怪小鹿站的位置太刁钻,欺骗了视觉,但如果有雷达呢?
斯坦福团队EquiBot:仅用 5 分钟演示,机器人就能学会日常操作
[IROS2021] 通过触觉感知物体重心,提升机器人抓取稳定性