V
主页
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
发布人
https://www.youtube.com/watch?v=NN6RsqJr8ic Inverse-Dynamics MPC via Nullspace Resolution Carlos Mastalli, Saroj Prasad Chhatoi, Thomas Corbères, Steve Tonneau, Sethu Vijayakumar Optimal control (OC) using inverse dynamics provides numerical benefits such as coarse optimization, cheaper computation of derivatives, and a high convergence rate. However, to take advantage of these benefits in model predictive control (MPC) for legged robots, it is crucial to handle efficiently its large number of equality constraints. To accomplish this, we first (i) propose a novel approach to handle equality constraints based on nullspace parametrization. Our approach balances optimality, and both dynamics and equality-constraint feasibility appropriately, which increases the basin of attraction to high-quality local minima. To do so, we (ii) modify our feasibility-driven search by incorporating a merit function. Furthermore, we introduce (iii) a condensed formulation of inverse dynamics that considers arbitrary actuator models. We also propose (iv) a novel MPC based on inverse dynamics within a perceptive locomotion framework. Finally, we present (v) a theoretical comparison of optimal control with forward and inverse dynamics and evaluate both numerically. Our approach enables the first application of inverse-dynamics MPC on hardware, resulting in state-of-the-art dynamic climbing on the ANYmal robot. We benchmark it over a wide range of robotics problems and generate agile and complex maneuvers. We show the computational reduction of our nullspace resolution and condensed formulation (up to 47.3%). We provide evidence of the benefits of our approach by solving coarse optimization problems with a high convergence rate (up to 10 Hz of discretization). Our algorithm is publicly available inside CROCODDYL. paper link: https://arxiv.org/abs/2209.05375
打开封面
下载高清视频
观看高清视频
视频下载器
00:00 9 款即将在生活工作中见到人形机器人
Deep Compliant Control for Legged Robots
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
Localizability-Aware LiDAR Registration for Robust Localization
Go2使用教学07-伴随教程
Go2使用教学04-标定教程
【人形机器人仿真】这走路姿势比我都标准
DeepMind x UCL RL Lecture Series - Exploration & Control 2
Go2开发教学05-底层服务接口
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
幽灵机器人 Ghost Robotics - Vision 60
Go2使用教学08-笨笨狗
波士顿动力机器人炫舞 Robot Dance
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
Go2使用教学05-运动姿态介绍
An Efficient and Versatile Framework for Multi-Contact Optimal Control
真牛!这个人形机器人吊打很多厂家的“产品”
Model and data, two essential ingredients for controlling legged robot
DeepMind x UCL RL Lecture Series Introduction to Reinforcement Learning 1
波士顿动力也上强化学习了,很强!Reinforcement Learning with Spot _ Boston Dynamics
蓝色皮肤,有点帅 Spot at Chevron Boston Dynamics
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
what is a ROS2 service P10
人形机器人足底机械结构设计
电流可达210A微型直流驱动器,最高可达300A,用于军工,转台,机器人#机器人 #驱动器 #仿人机器人
(Humanoids 2023) Learning Safer Footstep Planning Policies for Legged Robots
Vision-Based Terrain-Aware Locomotion for Legged Robots ---T-RO
Reinforcement learning for blind stair climbing with legged and wheeled robot
Perturbation-Resilient Bipedal Locomotion via Signal Temporal Logic Guided Model
呐,这就叫优雅!这就叫专业! Boston Dynamic Spot
模型预测控制简介
Learning Humanoid Locomotion with Transformers
write a ROS2 subscriber with Python P8
四足机器狗[滑稽]
Sampling based path replanning
How to design nonlinear MPC with deep learning prediction model
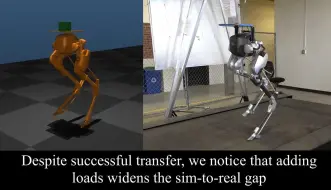
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
人形机器人学习跑酷|2024【上海科技大学】
世界上最真实的人形机器人来了,支持多国语言交流