V
主页
Localizability-Aware LiDAR Registration for Robust Localization
发布人
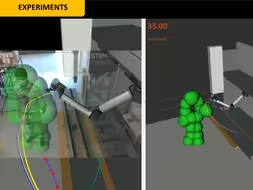
X-ICP: Localizability-Aware LiDAR Registration for Robust Localization in Extreme Environments Modern robotic systems are required to operate in challenging environments, which demand reliable localization under challenging conditions. LiDAR-based localization methods, such as the Iterative Closest Point (ICP) algorithm, can suffer in geometrically uninformative environments that are known to deteriorate point cloud registration performance and push optimization toward divergence along weakly constrained directions. To overcome this issue, this work proposes i) a robust fine-grained localizability detection module, and ii) a localizability-aware constrained ICP optimization module, which couples with the localizability detection module in a unified manner. The proposed localizability detection is achieved by utilizing the correspondences between the scan and the map to analyze the alignment strength against the principal directions of the optimization as part of its fine-grained LiDAR localizability analysis. In the second part, this localizability analysis is then integrated into the scan-to-map point cloud registration to generate drift-free pose updates by enforcing controlled updates or leaving the degenerate directions of the optimization unchanged. The proposed method is thoroughly evaluated and compared to state-of-the-art methods in simulated and real-world experiments, demonstrating the performance and reliability improvement in LiDAR-challenging environments. In all experiments, the proposed framework demonstrates accurate and generalizable localizability detection and robust pose estimation without environment-specific parameter tuning. paper link: https://arxiv.org/abs/2211.16335 video from: https://www.youtube.com/watch?v=f-i-br-l5QA Robotic Systems Lab: Legged Robotics at ETH Zürich
打开封面
下载高清视频
观看高清视频
视频下载器
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
老年照护的未来?——人居环境机器人“5号”(The Five,小五)
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged
RoLoMa: Robust Loco-Manipulation for Quadruped Robots with Arms
MuJoCo 仿真 案例欣赏
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
Dynamic Planning, forwards, backwards, and sideways on Stairs
人形机器人足底机械结构设计
ERASOR2:Instance-Aware Robust 3D Mapping of the Static World in Dynamic Scenes
MPC and RL, two different roads to legged locomotion, and that's OK
IROS 2020 Teaser · Dynamic Trajectories Robust to Disturbances
真牛!这个人形机器人吊打很多厂家的“产品”
[ ETH RSL ] mANYpulator – 移动操纵 (Martin Wermelinger)
ICRA 24 Adaptive Whole-body Robotic Tool-use Learning on Low-rigidity Humanoids
UMI on Legs: Making Manipulation Policies Mobile with Manipulation-Centric WBC
(T-RO 23) An Efficient Paradigm For Feasibility Guarantees For Legged Robots
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
[24 T-RO]Hybrid iLQR MPC for Contact Implicit Stabilization on Legged Robots
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
Tuning Legged Locomotion Controllers via Safe Bayesian Optimization
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
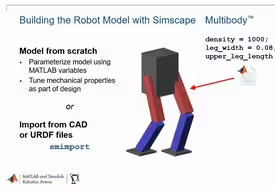
双足机器人的建模与仿真 MATLAB and Simulink
Tailoring model complexity in MPC of legged locomotion
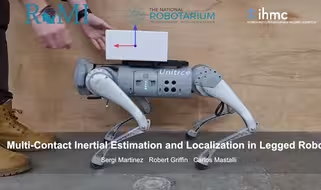
腿式机器人的多接触惯性估计与定位 [论文在审稿中]
当我在时速308的大老鼠上面开百度地图会是什么感觉
Sampling based path replanning
MIT Robotics - Jessy Grizzle - Mathematics and Learning for Bipedal Locomotion
这下真狗了 Boston Dynamics
Orthrus: A Dual-arm Quadrupedal Robot for Mobile Manipulation and Entertainment
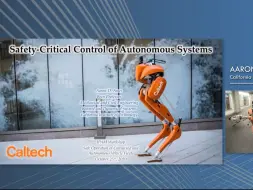
Safety-Critical Control of Autonomous Systems -Aaron Ames
双足机器人步态生成 MATLAB and Simulink
what is a ROS2 service P10
Impact-Aware Bimanual Catching of Large-Momentum Objects
Whole-body MPC for highly redundant legged manipulators
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
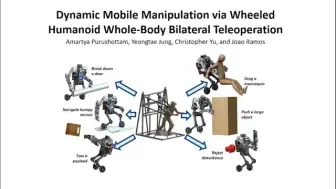
Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Wheeled Humanoid
CasADi 3.6 tutorial (C++ Matlab Python)