V
主页
燃爆了!手工制作最快的自动驾驶小车
发布人
国外小哥制造了一辆自动驾驶RC赛车,它可以沿着比赛路线行驶,然后试图在不撞车的情况下尽可能快地比赛,这一次要比你你前面看到的任何东西都快得多! 项目链接:https://github.com/CL2-UWaterloo/Raceline-Optimization 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) 1.自动驾驶感知:YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 2.自动驾驶感知:国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) 3.自动驾驶感知:多传感器融合中的毫米波雷达-视觉融合感知全栈教程 4.自动驾驶多传感器标定:Lidar+Radar+Camera+IMU离线/在线近20+标定方案 小助理微信咨询:AIDriver004
打开封面
下载高清视频
观看高清视频
视频下载器
终生SLAM框架!BioSLAM:用于一般地点识别的仿生终身记忆系统
高精地图制作关键技术及领域主流方案分享-part1
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
多传感器融合!BEV感知融合算法介绍
自动驾驶中的多传感器融合状态估计如何建模?
端到端算法是什么?自动驾驶领域是怎么做的?
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
自动驾驶面试一百问!秋招社招全搞定
端到端基础!绕不开的感知模块
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
从0到1!彻底搞懂BEVFormer算法原理
自动驾驶重型挖掘机-不可思议的创新技术!
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
2022最新!Nvidia完整阐释自动驾驶中的视觉感知(超赞技术)
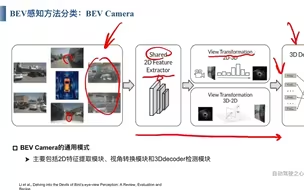
纯视觉/多传感器融合方案!BEV感知方法分类
支持在线时空标定!高效多传感器辅助惯性导航系统(ICRA2021)
强化学习用于四足机器人的高级技能(站立、俯冲行走)
太详细了!多传感器融合的策略和方法
传感器标定精度如何验证?(Lidar/Camera/Radar/IMU/鱼眼相机)
分类突破!自动驾驶中的Occupancy感知方法分类
多传感器标定的工具箱有哪些?
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
IROS2022 | MIMOSA:针对传感器退化的多模态SLAM框架
自动驾驶落地离不开的C++!快来实现第一个自动驾驶模块吧
ICRA 2023 | COVINS-G:一种通用的协同视觉惯性SLAM后端
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
自动驾驶 3D LiDAR目标跟踪技术实现细节大揭秘!
自动驾驶中的激光雷达点云分割-part2
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
IROS2022 | 连续时间立体视觉惯性里程计
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
《基于ROS2的决策规划算法工程》动态避障演示 无人小车的松弛感
香港大学最新!ROG-Map:一种基于LiDAR的高效机器人中心占用网格地图
量产基石!MapTR:在线高精地图经典开山之作
自动驾驶多传感器数据融合(4):多目标跟踪算法
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
ECCV2022 workshop | 自动驾驶中的自监督学习part1(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
SuperFusion:高精地图新基线