V
主页
Ubuntu录屏软件Kazam的安装与使用VID_20201103_224616
发布人
Ubuntu录屏软件Kazam的安装与使用
打开封面
下载高清视频
观看高清视频
视频下载器
把基于opencv4的vins-mono前端改为superpoint+光流 20230918_160125 截取视频
智能无人机课程 16 运动规划
ubuntu18.04-win10双系统修改开启启动顺序(修改为默认选win10启动)VID_20201111_002250
STlink驱动安装,keil设置,STlink程序烧录,重新上电运行20201027_185231
小车跑vinsgpu-ego VID_20221010_143409 截取视频
跑CMU的far_planner 还是存在一些问题 屏幕录像 2024-02-29 10:42:24
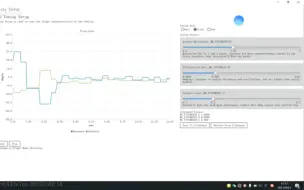
跟他人学PX4的PID调参录屏 20210423_143805
基于bag包跑港大的dyn_small_obs_avoidance 20230310_220441 截取视频
无人机cartographer+move_base VID_20220522_184019
第一次实飞两个机子的ego-swarm VID_20220817_152558
我自己ubuntu双系统安装过程part2(拍摄部分)VID_20201023_095435
发期望姿态+推力实现无人机悬停和走轨迹 VID_20220327_173714
在笔记本Ubuntu上运行ManhattanSLAM(基于TUM数据集运行) 20220820_112233 截取视频
在湖州飞的vinscpu-ego 手动点目标点 20221029
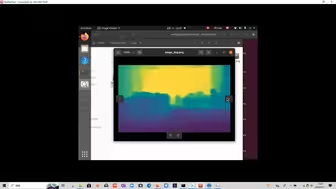
在OrinNX上部署运行PlaneRecNet 对单幅图像进行深度估计和平面检测 20230810_150338 截取视频 截取合并
ROS安装(包含终端一些配置)librealsense安装realsense-ros安装录屏
基于D435i跑RGBD的ORBSLAM3屏幕录像 2022-08-20 22-27-46
2021弄T265与GPS融合 VID_20210829_100242
智能无人机课程 2 四旋翼无人机的组成和拼装 上
小车cartographer+move_base VID_20230315_184023
移植hybrid astar 20231022_180417 截取视频
智能无人机课程 10 飞行日志分析与pid调参
ACfly-T265第一次飞(求稳同时装了TFmini)VID_20201107_125411
ACfly-T265第九次飞,人走到T265前面拍摄,后来不小心碰到油门炸机,挺可惜的VID_20201109_163141
基于kalibr docker的D435i双目标定和双目IMU联合标定操作演示录屏20220416_125342
ACfly-T265第二次飞(纯T265)VID_20201107_151114
树莓派的一些基础操作VID_20201023_133956
ACfly-T265第三次飞,纯T265,也是第一次真正完整飞成VID_20201107_163144
基于D435i跑vins+DenseSurfelMapping注意点说明与操作演示20240328_202507
第一次飞ACfly-猛禽360 VID_20201103_121832
我自己ubuntu双系统安装过程part1(录屏部分)20201023_085544_ev_fixed
把ego的plan_env模块单独取出订阅位姿和深度图构建自己可用的导航地图 20240315_091408 截取视频 截取合并
嘉立创SMT BOM元件配单演示20201027_095109
ACfly-T265第八次飞行,专门选了个光照好的时间进行专门的定点测试,看看定的如何VID_20201109_133659
第二天给白地板铺上彩色海绵垫,ACfly-猛禽360定得还可以,b为默认5.5 VID_20201104_143046
基于opencv实现先飞吊舱的KCF框选跟踪 20231110
ACfly-T265第七次飞,拉上窗帘看定点效果VID_20201109_121755
ACfly-T265炸机后拍VID_20201109_163647
aruco二维码检测定位原理讲解及基于opencv的代码和ros功能包实现 20240403_181351
ACfly-T265的遥控器操作VID_20201110_234539