V
主页
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式)
发布人
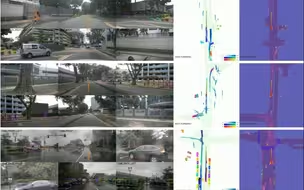
Waabi最新!UnO:用于感知和预测的SOTA模型(超越监督方式),论文链接:https://arxiv.org/pdf/2406.08691。感知世界并预测其未来状态是自动驾驶的一项关键任务。监督方法利用带注释的目标标签来学习世界模型:传统上使用目标检测和轨迹预测,或时间鸟瞰图(BEV)占用字段。然而,这些注释成本高昂,通常仅限于一组预定义的类别,这些类别并不能涵盖我们在路上可能遇到的所有内容。相反,我们从激光雷达数据中学会了通过自监督来感知和预测连续的4D(时空)占用场。这种无监督的世界模型可以轻松有效地转移到下游任务中。我们通过添加轻量级学习渲染器来解决点云预测问题,并在Argoverse 2、nuScenes和KITTI中实现了最先进的性能。为了进一步展示其可转移性,我们对BEV语义占用预测模型进行了微调,并表明它优于完全监督的最新技术,尤其是在标记数据稀缺的情况下。最后,与先前最先进的时空几何占用预测相比,我们的4D世界模型实现了对与自动驾驶相关的类中对象的更高回忆。
打开封面
下载高清视频
观看高清视频
视频下载器
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
端到端算法是什么?自动驾驶领域是怎么做的?
英伟达最新 | OmniDrive:用于3D感知、推理和规划功能的自动驾驶大语言模型
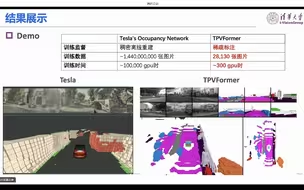
透彻!特斯拉occupancy network详解
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
端到端算法有哪些优势?完爆传统感知规控?
特斯拉的World Model是什么?怎么做端到端训练?
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
大火的BEVFusion算法详解
没有BEV特征如何做BEV感知?(旷视团队分享PETRv2/StreamPETR/CMT等SOTA方案)
PLUTO算法详解:端到端首次超越基于规则的方法
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
渲染速度提高5倍!GaussianOcc:借助3D GS,没有标注也能做Occ(东京大学)
一文尽览:自动驾驶大语言模型应用综述分享
高精地图制作关键技术及领域主流方案分享-part1
多传感器融合!BEV感知融合算法介绍
上车必备的Occupancy算法真值是如何获取的?
最近一个月,Occupancy领域有哪些值得关注的工作?
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
世界模型!特斯拉CVPR2023 Workshop!
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
什么是端到端自动驾驶?什么是基础world model?
落地之殇 | 联合预测是端到端正确的道路么?
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
ECCV2022 | Box2Mask:强!mAP-50达到全监督97%!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
CVPR2022 | MeMOT:具有记忆的多目标跟踪
多障碍物联合预测!理论全搞定~
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
NeRF如何监督Occupancy Networks?
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
上海AI Lab最新!Depth any Video:提升深度估计的一致性以及合成更多真实带有标注的数据
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)