V
主页
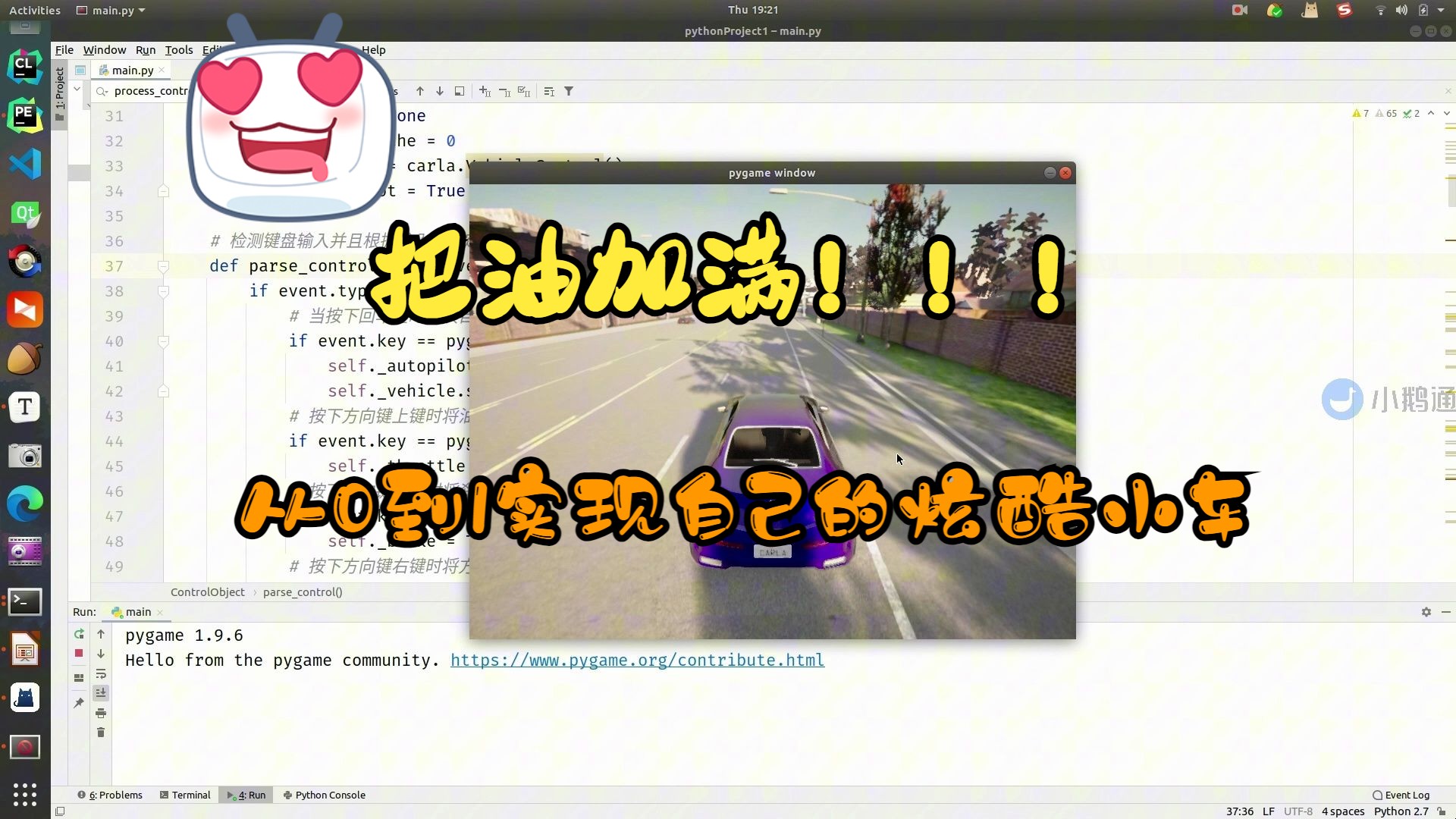
你有没有心动???把油加满,从0到1实现自己的炫酷小车!
发布人
视频出自自动驾驶之心平台《Carla-Autoware联合仿真实战》:https://wrzpl.xetslk.com/s/1mVJYs
打开封面
下载高清视频
观看高清视频
视频下载器
【行业内幕】百度的技术路径 永远不可能赢亏平衡 自动驾驶抢出租车司机饭碗 还早8至10年 | LI道长的世界观48
清华&地平线最新开源!全任务SOTA!SparseDrive:端到端自动驾驶新范式!
Segment Anything之后,分割的路在何方?
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
2024世界人工智能大会 李彦宏说:“没有应用,光有一个基础模型,不管是开源还是闭源,一文不值!”
BEVCar:SOTA!RV融合完成地图和分割双任务
真不愧是百刀神书!使用python无库从零搭建自己的神经网络!
OPPO和港中文大学推出GlyphDraw2,多文字海报生成如此简单!使用扩散模型和LLM自动生成复杂字形海报的端到端方案
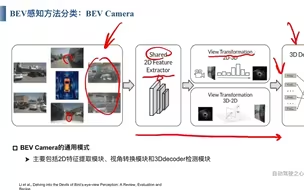
纯视觉/多传感器融合方案!BEV感知方法分类
为什么LLM认为:9.11大于9.8?
超详细!BEV感知算法的应用介绍
Hydra MDP | 英伟达如何理解端到端自动驾驶?
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
国内智驾老兵百度开源BEVWorld:通过统一BEV潜在空间实现自动驾驶的多模态世界模型
无人驾驶萝卜快跑投入武汉市场后,好消息:超雄司机少了,坏消息:超雄才乘客变多了!机器学习|深度学习|计算机视觉
伴侣机器人来了,这真的是中国科技界很有趣的事情!
L4自动驾驶感知的终极形态会是协同感知吗?UCLA顶级博士告诉你答案!
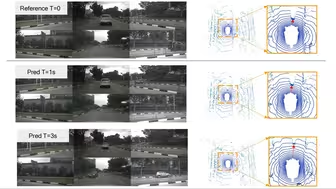
World Model!世界模型,迈向自主机器智能时代!城市场景下的世界模型算法—MILE
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
无奈,第一刀砍向了民生
燃爆了!手工制作最快的自动驾驶小车
特斯拉的4D自动标注详解!为什么无标注数据work?
决策规划都有哪些框架?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
最新!如何使用深度强化学习在未知环境中进行导航?
『汽车人有话说』试驾都要排队的小米,自动驾驶到底行不行
深度学习调参有哪些技巧?
百度和特斯拉,谁才是自动驾驶之王?
司机下岗?AI无人驾驶真的行吗?萝卜快跑初体验【BB Time第443期】
牛的!大佬是如何几分钟聊透时空联合规划框架的?
CurveFormer:基于曲线查询和注意力的曲线传播进行3D车道检测
AI预告片《复仇者联盟5:毁灭博士》
实习Vlog | 高薪公司?养猪厂?00后来苏州Momenta入职第一天,感觉咋样?
巴黎奥运会一大亮点
毫米波雷达-视觉融合感知方法(前融合/特征级融合/数据级融合)
聊一聊4D成像雷达在辅助驾驶领域的应用
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
AI 工程师都应该知道的GPU工作原理,TensorCore
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
使用YOLOv4完成激光雷达点云下的3D目标检测!