V
主页
白天图像变夜晚数据SOTA方法| ManiFest:图像翻译新思路!(ECCV2022)
发布人
论文链接:https://arxiv.org/abs/2111.13681 代码链接:https://github.com/cv-rits/Manifest 视频链接:https://www.youtube.com/watch?v=vjsOAmrNucM 大多数图像到图像的翻译方法需要大量的训练数据,这限制了它们的适用性。相反, ManiFest是一个用于few-shot图像翻译的框架,它仅从少数图像中学习目标域的上下文感知表示。为了增强特征一致性,框架学习源和代理锚域(假设由大量图像组成)之间的样式。通过基于面片的对抗性和特征统计对齐损失,将学习的流形插值并变形到少数target目标域。所有这些组件在单个端到端循环期间同时训练。广泛的实验证明了ManiFest在多任务上的有效性,在所有指标以及基于一般和示例的场景中都优于最新技术。
打开封面
下载高清视频
观看高清视频
视频下载器
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
【ICCV 2023】HAMLET:实时语义分割域自适应方法
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
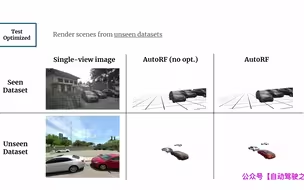
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
分类突破!自动驾驶中的Occupancy感知方法分类
数据为王!自动驾驶开源数据体系现状与未来
NeRF如何监督Occupancy Networks?
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
KITTI SOTA!即插即用,单目3D检测中的单应性损失!(CVPR2022)
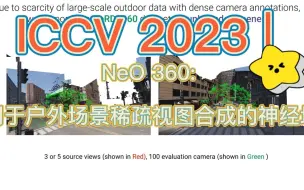
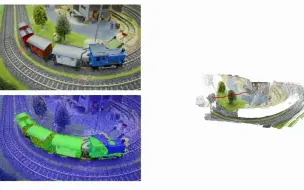
ICCV 2023 | NeO 360: 用于户外场景稀疏视图合成的神经场
【ECCV 2022】清华大学&字节跳动提出 ParticleSfM:从单目视频中估计运动相机的位姿
冠军!英伟达荣获CVPR端到端自动驾驶挑战赛第一名
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
ECCV 2024 | 深度估计不死!DoubleTake:几何引导下的深度估计
鱼眼相机和超声波雷达是怎么做融合的?
SOTA!ECCV2022 | 实现精确的主动相机定位(Camera Localization)
Nerf+SLAM会擦出什么样的火花?
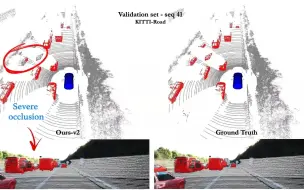
CVPR2022 oral | 弱监督Lidar点云分割SOTA!8% 标注数据下达到 95.7% 的全监督性能!
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
南洋理工大学博士分享!规模化可学习与交互式的自动驾驶决策系统如何构建?
自动驾驶中的多传感器融合状态估计如何建模?
CVPR2022 | MeMOT:具有记忆的多目标跟踪
面向下一代自动驾驶:全栈里程碑综述汇总
看看顶级大佬如何梳理L2++决策算法的演进-上
自动驾驶汽车是如何在高精地图中建立精确位置的?
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
IROS2022最新 | 基于激光雷达的三维运动目标分割的高效时空信息融合
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
Pytorch需要系统学习所有函数吗?零基础入门Pytorch最佳学习路径分享,带你快速上手Pytorch框架!(深度学习/计算机视觉)
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM
All in 算法并不是最佳职业发展道路?软件基础架构也是必须了解的!
IROS 2024 | NAVINACT:结合导航和模仿学习进行增强强化学习
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
自动驾驶的规划控制究竟在做什么?我们为什么需要规划控制