V
主页
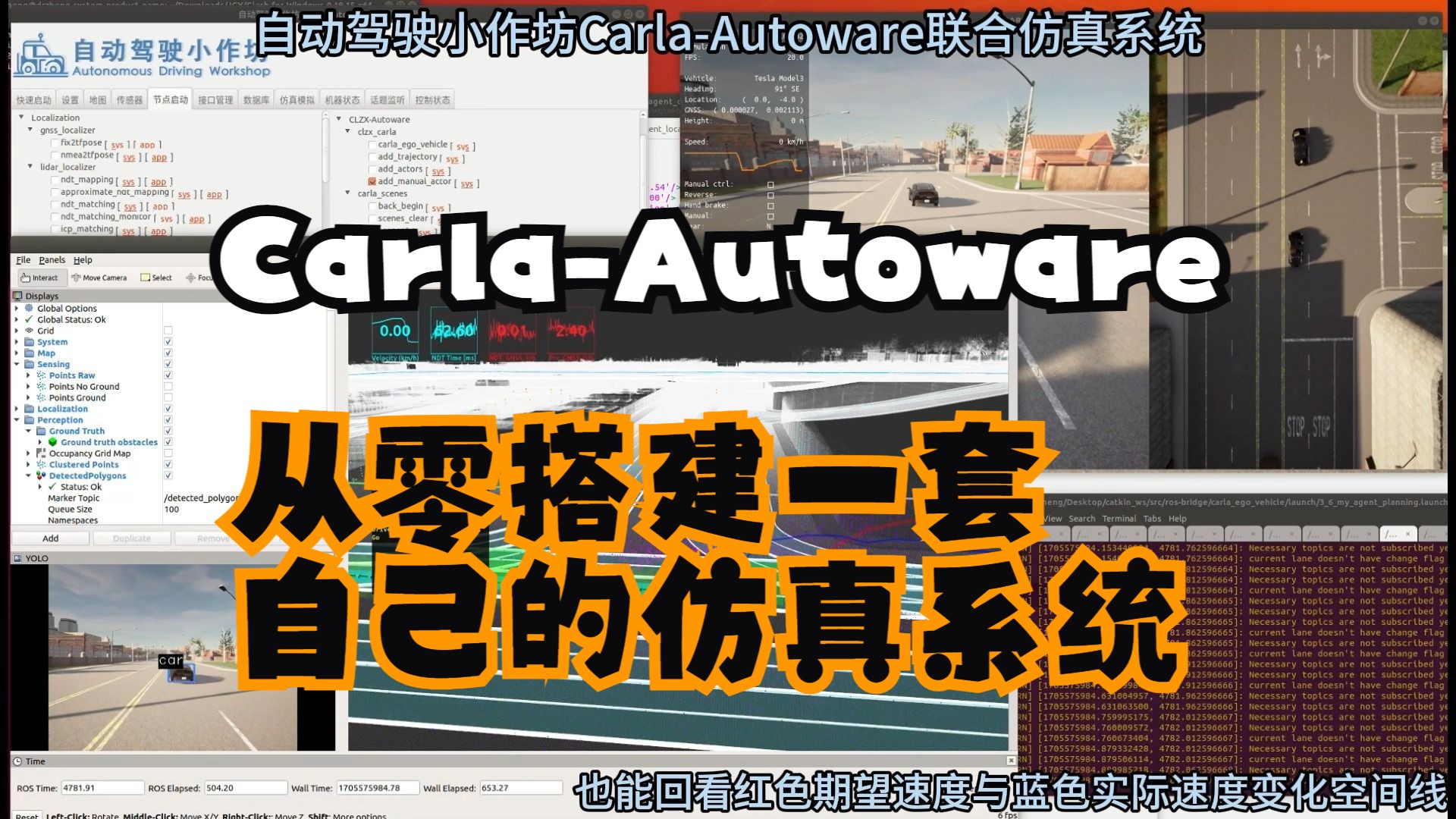
自动驾驶离不开的仿真!Carla-Autoware怎么联合从零搭建一套系统?
发布人
教你如何从零搭建一套属于自己的自动驾驶仿真系统,视频出自国内首个自动驾驶仿真全栈教程:Carla-Autoware联合仿真实战,课程链接:https://wrzpl.xetslk.com/s/1mVJYs,欢迎加入学习~
打开封面
下载高清视频
观看高清视频
视频下载器
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
自动驾驶仿真框架CARLA教程(6):Longer-term model results
自动驾驶carla ros仿真Apollo移植算法调试
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
闭环驾驶SOTA!CarLLaVA: CARLA自动驾驶挑战赛2.0第一名方案!
【深信科创联合制作】仿真数据的一百种玩法 | 基于Carla传感器的仿真数据增强实战来了!
为什么自动驾驶离不开模型部署?
搞懂了!原来激光雷达和相机的内外参是这样标定的
ITSC2023 | LimSim:长期可交互多场景交通仿真器
从0到1!彻底搞懂BEVFormer算法原理
大火的BEVFusion算法详解
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
Corner Case不可怕!自动驾驶Corner Case可控生成系统性解决方案来优化!
ICRA2023 | 激光雷达相机内外参联合标定方案!
宏景智驾 | 通过3DBEV实现模拟目标检测、建图和定位
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
被PPO算法惊艳到了--自动驾驶强化学习决策规划工程-PPO算法实战
燃爆了!手工制作最快的自动驾驶小车
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
如何从零搭建自己的自动驾驶C++功能模块?
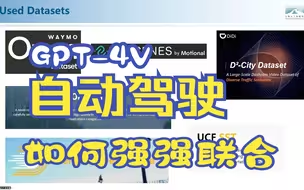
聊一聊自动驾驶数据集的最新趋势、数据集管理技术
特斯拉的World Model是什么?怎么做端到端训练?
一文尽览:自动驾驶大语言模型应用综述分享
跟知乎大V一起来学BEV!视觉BEV感知和跟踪算法详解
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
太详细了!多传感器融合的策略和方法
Nerf+SLAM会擦出什么样的火花?
看到了这个视频,彻底搞懂了PETR算法!
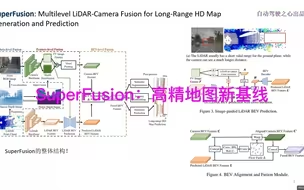
SuperFusion:高精地图新基线
端到端趋势下,传统规控还有未来么?
自动驾驶多传感器数据融合(1):什么是多传感器融合?
牛的!大佬是如何几分钟聊透时空联合规划框架的?
在线高精地图与城市NOA是什么关系?为什么如此重要?
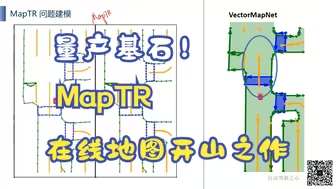
量产基石!MapTR:在线高精地图经典开山之作
GPT-4V与自动驾驶更配?GPT-4V在自动驾驶中的早期探索!
自动驾驶汽车是如何在高精地图中建立精确位置的?