V
主页
动力系统及车辆的自抗扰控制及其工程应用
发布人
动力系统及车辆控制,是改善系统的运行能效、响应速度及抗干扰能力的关键,但面临多执行机构协同、运行过程非线性、传热传质大时滞、外部环境强干扰等控制挑战。此次会前班,将从初学者及工程技术人员的第一视角,介绍自抗扰控制在发动机增压控制、转速控制、空燃比控制,以及无人驾驶车辆循迹控制中的应用。通过几个成功工程应用的案例,分析动力系统及车辆控制中面临的控制难题及数学模型,探讨模型信息的利用及模型参数的学习方法,分享多变量扩张状态观测器、预测扩张观测器等新方法的工程应用情况。通过现场的互动交流,讨论自抗扰控制的前沿进展与工程应用的结合方法,讨论目前车辆与动力行业控制面临的一些难题。
打开封面
下载高清视频
观看高清视频
视频下载器
薛文超 自抗扰控制(1)
点评:何谓控制? (Matlab 科普)
聂卓赟:著名Z-N PID参数整定法的自抗扰解释
自抗扰控制导读 II:《控制理论---模型论还是控制论》;《自抗扰控制技术》
7月18日自抗扰控制Zoom研讨:ADRC设计的前提,需要的信息,是不是无模型控制,... 等等
ADRC登堂入室,进入Matlab-Simulink核心区域
薛文超 自抗扰控制(2)
视听版:什么叫滤波?什么叫带宽?
能源系统的自抗扰控制与问题:延迟,不稳定,非最小相位,多变量
ChatGPT中的工程控制问题
走马观花看控制发展简史
Matlab是怎么定位ADRC的?
抗扰演示:植入工业PLC的ADRC
自抗扰控制的三个层次与工程控制的钱-关-韩范式 (降噪、字幕版)
走向《工程控制论》1: 课程介绍
自抗扰控制系统频域相位分析与设计
李向阳: Between PID and ADRC
自抗扰控制-理论创新与工程应用的一段历史回顾
高志强:自抗扰控制研讨会致辞
工程控制的可用带宽: 定义,计算,实例,突破
ADRC-vs-PID 韩京清老师97年在CSU做的第一个ADRC运动控制的实验。
2015年12月自抗扰控制ADRC讲座与研讨会实况录像(上传的顺序还没有调整好)
金辉宇:古典控制论与低阶LADRC参数整定
高志强老师特邀报告01092018 - 徘徊在工程控制的理想与现实之间
自抗扰控制导读 V:扩张状态观测器
让学生近乎崩溃的带阻滤波器
《反馈控制的科学与艺术》2:古典控制论的两个版本
工业伺服中低频谐振问题的ADRC解决方案
突破带宽上限的伺服控制
厦门研讨会发言: 高志强, 2022.11.27
在DC-DC变换器中理解总扰动
自抗扰控制导读 I 2020-06-27
8-5 搞不清反馈的概念,还搞什么反馈控制?
本科教学:自抗扰控制的设计与仿真
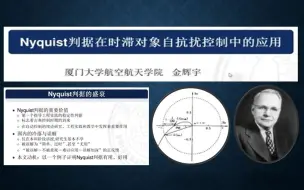
奈奎斯特判据与ADRC:金辉宇, 厦门华侨大学研讨会讲座, 20221127
机电系统自抗扰控制以及HIL实验平台开发的探索
走向《工程控制论》4:什么是状态?
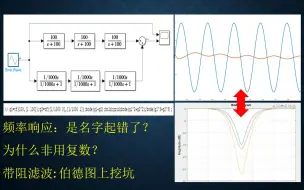
频率响应:怎么把名字起错了?
反思工程控制的基本原理6:尊重客观规律,不做数学公式的奴隶
自抗扰控制导读 III: 剖析经典PID调节器,澄清工程控制的原始问题