V
主页
IROS 2020 Teaser · Dynamic Trajectories Robust to Disturbances
发布人
https://www.youtube.com/watch?v=KK-ZCWsEGGg Optimizing Dynamic Trajectories for Robustness to Disturbances Using Polytopic Projections Henrique Ferrolho, Wolfgang Merkt, Vladimir Ivan, Wouter Wolfslag, Sethu Vijayakumar This paper focuses on robustness to disturbance forces and uncertain payloads. We present a novel formulation to optimize the robustness of dynamic trajectories. A straightforward transcription of this formulation into a nonlinear programming problem is not tractable for state-of-the-art solvers, but it is possible to overcome this complication by exploiting the structure induced by the kinematics of the robot. The non-trivial transcription proposed allows trajectory optimization frameworks to converge to highly robust dynamic solutions. We demonstrate the results of our approach using a quadruped robot equipped with a manipulator. paper link: https://arxiv.org/abs/2003.00609
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器人足底机械结构设计
人形机器人灵巧手臂最新成果
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
A Feasibility-Driven Approach to Control-Limited DDP
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
通过优化理论指导设计双足以达到控制和任务的最优
具有闭合/并行运动链的人形机器人的全身控制WBC:袋鼠案例研究
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
这下真狗了 Boston Dynamics
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
Control is dead ?control+ learning才是未来
双足机器人步态生成 MATLAB and Simulink
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
Bipedal Safe Navigation over Uncertain Rough Terrain
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
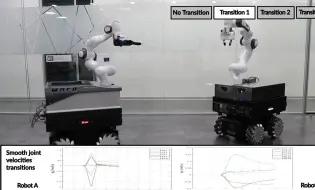
A Distributed Processing Approach for Smooth Task Transitioning in SHC
(Humanoids 22)半人马机器人爬上 0.3 m 的平台,手臂上承载 17 kg 的有效负载
ANYmal在金属、采矿厂进行机器人自主巡检
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
(ICRA 24)A Lightweight Free-Climbing Robot for Extreme Terrain Exploration
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
通过对抗运动先验学习四足机器人的双足行走
基于分层优化的四足机器人全身运动控制搬运重物
Deep Compliant Control for Legged Robots
波士顿动力也上强化学习了,很强!Reinforcement Learning with Spot _ Boston Dynamics
Safety-Critical Control of Autonomous Systems -Aaron Ames
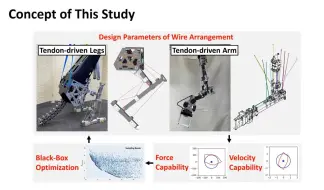
(RA-L 2024) Design Optimization of Wire Arrangement for Tendon-driven Robots
Tutorial - Crocoddyl - Nicolas Mansard
(ICRA 2024) Actor-Critic Model Predictive Control
MuJoCo 仿真 案例欣赏
IHMC Atlas walking through a hatch holding a fire hose
博士论文答辩 - Alexander Schperberg - 统一基于模型的优化和机器学习