V
主页
MIT Mini-Cheetahs looking for a new home
发布人
MIT Mini-Cheetahs looking for a new home video copyright ownership belongs to [NAVER LABS]
打开封面
下载高清视频
观看高清视频
视频下载器
The MIT Humanoid Robot Design Motion Planning and Control ForAcrobatic Behaviors
MuJoCo 仿真 案例欣赏
Ghost Robotics 爬楼梯 不错哟
An Efficient and Versatile Framework for Multi-Contact Optimal Control
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
人形机器人足底机械结构设计
A Feasibility-Driven Approach to Control-Limited DDP
Humanoid robot research result highlights in 2022- CNRS-AIST JRL
(RA-L 23) Reactive Landing Controller for Quadruped Robots
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
NASA’s first humanoid robot Valkyrie is being tested in Australia
幽灵机器人 Ghost Robotics - Vision 60
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
KAIST Hound, a Quadruped Robot 100m World Record
IHMC Atlas Clearing Debris with Teleoperation
人形机器人灵巧手臂最新成果
蓝色皮肤,有点帅 Spot at Chevron Boston Dynamics
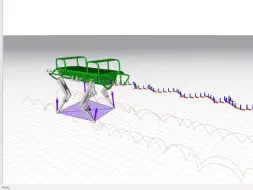
DreamWaQ: legged robot walks in harsh environments with its imagination P1
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
Reinforcement learning for blind stair climbing with legged and wheeled robot
Deep Compliant Control for Legged Robots
波士顿动力也上强化学习了,很强!Reinforcement Learning with Spot _ Boston Dynamics
呐,这就叫优雅!这就叫专业! Boston Dynamic Spot
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
The legged robot whole-body State RVIZ plugin
Meet the Futuristic Military Robot Dog
Ghost-robotics 应用案例集锦,很强!
未来机器人审判人类的重要视频证据 存档
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
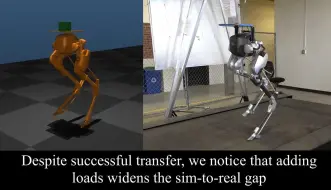
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
Visual CPG-RL: Learning Central Pattern Generators for Visually-Guided Quadruped
(T-RO 23) An Efficient Paradigm For Feasibility Guarantees For Legged Robots
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
SLoMo: A General System for Legged Robot Motion Imitation from Casual Videos