V
主页
京东 11.11 红包
DTC: Deep Tracking Control 2
发布人
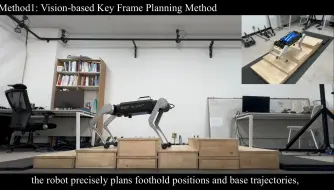
DTC: Deep Tracking Control Legged locomotion is a complex control problem that requires both accuracy and robustness to cope with real-world challenges. Legged systems have traditionally been controlled using trajectory optimization with inverse dynamics. Such hierarchical model-based methods are appealing because of intuitive cost function tuning, accurate planning, generalization, and, most importantly, the insightful understanding gained from more than one decade of extensive research. However, model mismatch and violation of assumptions are common sources of faulty operation. Simulation-based reinforcement learning, on the other hand, results in locomotion policies with unprecedented robustness and recovery skills. Yet, all learning algorithms struggle with sparse rewards emerging from environments where valid footholds are rare, such as gaps or stepping stones. In this work, we propose a hybrid control architecture that combines the advantages of both worlds to simultaneously achieve greater robustness, foot-placement accuracy, and terrain generalization. Our approach uses a model-based planner to roll out a reference motion during training. A deep neural network policy is trained in simulation, aiming to track the optimized footholds. We evaluated the accuracy of our locomotion pipeline on sparse terrains, where pure data-driven methods are prone to fail. Furthermore, we demonstrate superior robustness in the presence of slippery or deformable ground when compared with model-based counterparts. Last, we show that our proposed tracking controller generalizes across different trajectory optimization methods not seen during training. In conclusion, our work unites the predictive capabilities and optimality guarantees of online planning with the inherent robustness attributed to offline learning. paper link : https://www.science.org/doi/10.1126/scirobotics.adh5401
打开封面
下载高清视频
观看高清视频
视频下载器
人形机器人足底机械结构设计
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
Deep Compliant Control for Legged Robots
[24 RA-L] 摆动速度超快!一种适合足式机器人快速摆动的腿部结构, 很巧妙!
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
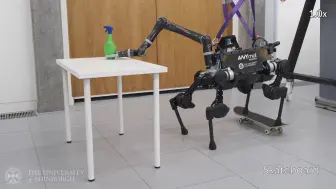
基于分层优化的四足机器人全身运动控制搬运重物
DTC: Deep Tracking Control 4
Safety-Critical Control of Autonomous Systems -Aaron Ames
人形机器人腿部结构 基于 4DoF 球面并联机构
How to design nonlinear MPC with deep learning prediction model
Contact-Implicit MPC四足机器人双足倒立与行走
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
幽灵机器人 Ghost Robotics - Vision 60
耐冲击腿部结构
Consensus Complementarity Control for Multi-Contact MPC
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
通过优化理论指导设计双足以达到控制和任务的最优
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
Versatile Skill Control via Self-supervised Adversarial Imitation
PiPER:仅售 2,499 美元 AgileX 的下一代轻型机械臂!
CasADi 3.6 tutorial (C++ Matlab Python)
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
[RA-L 2020] Object Recognition, Contact Simulation, Detection, and Control
Spot 自主乘坐电梯和开门
MPC and RL, two different roads to legged locomotion, and that's OK
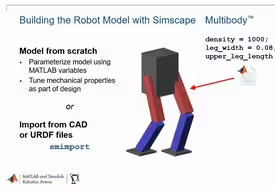
基于模型控制的人形机器人行走 MATLAB and Simulink
Implementing Torque Control-Based Biped Walking of Humanoid Robots
NASA’s first humanoid robot Valkyrie is being tested in Australia
双足机器人的建模与仿真 MATLAB and Simulink
IROS 2020 Teaser · Dynamic Trajectories Robust to Disturbances
Part 3 (Final) - How to Solve Inverse Kinematics of a 4 Leg Robot
(RA-L 23) Reactive Landing Controller for Quadruped Robots
四足运动:用三种不同的方法在崎岖地形上行走
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
双足机器人步态生成 MATLAB and Simulink