V
主页
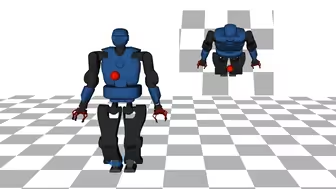
Real-time Model Predictive Control with Zonotope-Based Neural Networks for Biped
发布人
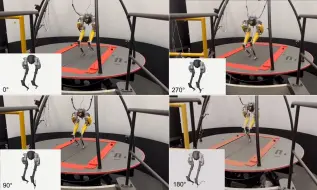
https://www.youtube.com/watch?v=w5cg66GQPUQ Real-time Model Predictive Control with Zonotope-Based Neural Networks for Bipedal Social Navigation Abdulaziz Shamsah, Krishanu Agarwal, Shreyas Kousik, Ye Zhao This study addresses the challenge of bipedal navigation in a dynamic human-crowded environment, a research area that remains largely underexplored in the field of legged navigation. We propose two cascaded zonotope-based neural networks: a Pedestrian Prediction Network (PPN) for pedestrians' future trajectory prediction and an Ego-agent Social Network (ESN) for ego-agent social path planning. Representing future paths as zonotopes allows for efficient reachability-based planning and collision checking. The ESN is then integrated with a Model Predictive Controller (ESN-MPC) for footstep planning for our bipedal robot Digit designed by Agility Robotics. ESN-MPC solves for a collision-free optimal trajectory by optimizing through the gradients of ESN. ESN-MPC optimal trajectory is sent to the low-level controller for full-order simulation of Digit. The overall proposed framework is validated with extensive simulations on randomly generated initial settings with varying human crowd densities. paper link: https://arxiv.org/abs/2403.16485
打开封面
下载高清视频
观看高清视频
视频下载器
Conflict-based Model Predictive Control for Scalable Multi-Robot Motion Planning
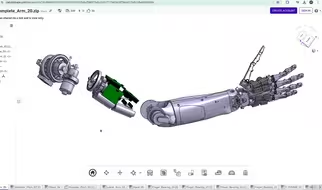
人形机器人足底机械结构设计
qpSWIFT : A Real-time Sparse Quadratic Program Solver for Robotic Applications
模型预测控制 (MPC) 从推导到C++ 实现,详细教程 仅使用 Eigen 库 代码在简介
TinyMPC model-predictive-control-on-resource-constrained-microcontrollers
[IROS 2022] 四足机器人通过端到端学习运动和局部导航来掌握高级技能
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
(ICRA 2024) Actor-Critic Model Predictive Control
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
CMU 开源四足机器人运动控制及仿真代码 Quad-SDK
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
ETH 最新Science Robotics基于学习的轮腿机器人自主导航和运动
Control is dead ?control+ learning才是未来
An Efficient and Versatile Framework for Multi-Contact Optimal Control
EAGLE: The First Event Camera Dataset Gathered by an Agile Quadruped Robot
(RA-L 23) Reactive Landing Controller for Quadruped Robots
(Humanoids 22)半人马机器人爬上 0.3 m 的平台,手臂上承载 17 kg 的有效负载
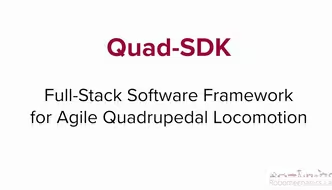
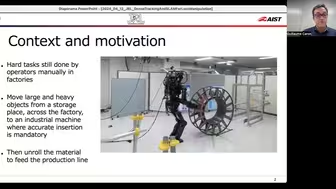
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
ANYmal在金属、采矿厂进行机器人自主巡检
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
幽灵机器人 Ghost Robotics - Vision 60
A Brief Introduction to Control Lyapunov Function and Control Barrier Function
Perturbation-Resilient Bipedal Locomotion via Signal Temporal Logic Guided Model
Bipedal Locomotion Reward Learning from Demonstrations via Inverse Reinforcement
A Feasibility-Driven Approach to Control-Limited DDP
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
Learning Morphologically Adaptive Locomotion Controllerfor Quadruped
人形机器人3d 打印手臂 网址在简介 欢迎关注三连
Topology-Based MPC for Automatic Footstep Placement and Contact Surface Selectio
(ICRA 24) Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jump
Vision-Based Terrain-Aware Locomotion for Legged Robots ---T-RO
Centroidal Preview Control for Humanoid Multi-Contact Motion RA-L IROS 2022
Spot 自主乘坐电梯和开门
Reinforcement Learning for Versatile, Dynamic, and Robust Bipedal Locomotion
(submit to IROS 24) A Single-Leg Robot that Mimics the Human Leg and Toe
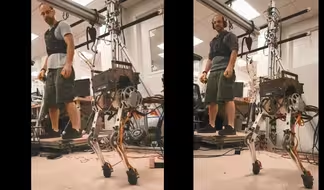
SCIENCE ROBOTICS: Dynamic locomotion synchronization via bilateral tele
Inverse-Dynamics MPC via Nullspace Resolution (IROS'23 Presentation)
Visual CPG-RL: Learning Central Pattern Generators for Visually-Guided Quadruped
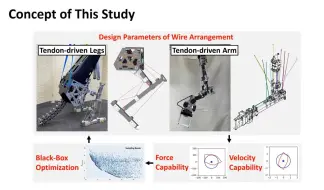
(RA-L 2024) Design Optimization of Wire Arrangement for Tendon-driven Robots
Safety-Critical Control of Autonomous Systems -Aaron Ames