V
主页
ghost robotics 四足机器人
发布人
ghost robotics 四足机器人
打开封面
下载高清视频
观看高清视频
视频下载器
写了一个人形机器人仿真,适用5或者6自由度的腿形
MuJoCo 仿真 案例欣赏
幽灵机器人 Ghost Robotics - Vision 60
ETH最新论文 重新思考鲁棒性评估: 基于学习的四足运动控制的对抗性攻击
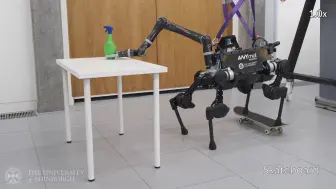
(Humanoid)An IntegratedForceSensitive, Impedance Controlled, Tendon-Driven Wrist
Control is dead ?control+ learning才是未来
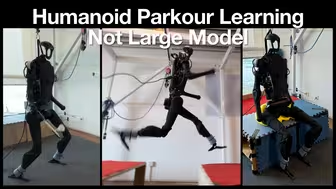
我们的人形机器人不愿意使用大模型去思考。但是它很爱玩耍。[humanoid parkour learning]
High-Power, Flexible, and Robust Musculoskeletal Hand (IROS 2017)
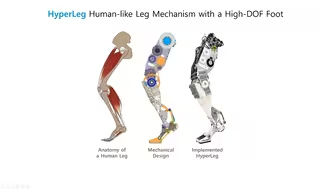
高度动态运动的类人机器人腿和脚
真牛!这个人形机器人吊打很多厂家的“产品”
ETH 最新RL成果,已开源!SMUG 规划器:适用于具有挑战性环境下的移动机器人的安全多目标规划器
机器人小派&人类幼崽
(IROS 2023) 浮动基座机器人本体感受外部力矩学习及其在类人运动中的应用
ANYmal在金属、采矿厂进行机器人自主巡检
ICRA 24 Convergent iLQR for Safe Trajectory Planning and Control of Legged Robot
(T-RO 24)Tube Acceleration:Robust Dexterous Throwing against Release Uncertainty
蜜蜂启发的四足机器人3D数模图纸
🤖保留节目!ICRA 2024机器人游行绕场一周献上集体舞
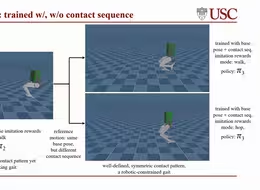
基于学习的多模式双足运动和隐式转换:一种多功能的策略方法
Humanoid Loco-Manipulations ... 3D Tracking and SLAM with Wide-Angle Depth-Image
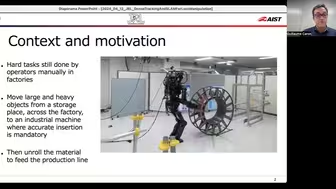
ICRA 24 | Sim-To-Real Learning for Humanoid Box Loco-Manipulation
【可动人仔系列】3D打印的多关节可动四足机器人,组装教程。自己设计的第三代可动四足。去年就设计生产了,今天拿出来拍个视频
Part 3 (Final) - How to Solve Inverse Kinematics of a 4 Leg Robot
IROS 2020 Teaser · Dynamic Trajectories Robust to Disturbances
我们把机器人拉出门散了个步,还是原来的模型,没有新训练 [Humanoid Parkour Learning]
(RA-L 23) Reactive Landing Controller for Quadruped Robots
日本人形机器人Tokyo Robotics灵巧手抓握演示,它可以利用扭矩和阻抗控制来抓取任何形状的物体,无需事先了解物体的大小!
arxiv最新论文 基于学习的人形机器人离散地形上的通用和动态运动
SLoMo: A General System for Legged Robot Motion Imitation from Casual Videos
五指力触觉抓取
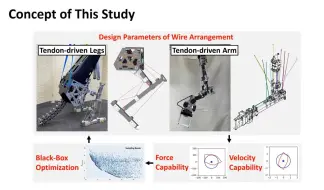
(RA-L 2024) Design Optimization of Wire Arrangement for Tendon-driven Robots
(RA-L 24)Dynamic Mobile Manipulation via Whole-Body Teleoperation of a Humanoid
Chat-GPT只是Play的一环 卡内基梅隆大学联合上海交通大学在H1人形机器人身上玩出花来了
Foothold Evaluation Criterion for Dynamic Transition Feasibility for Quadruped
用于人形机器人导航的 3D 多边形建图
Combining Learning-Based Locomotion with Model-Based Manipulation for Legged
你感觉到机器人的恐怖如斯了吗?未来已来
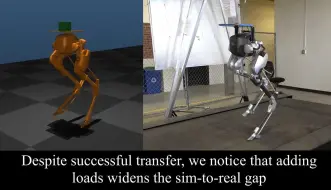
Sim-to-Real Learning for Bipedal Locomotion Under Unsensed Dynamic Loads
Safety-Critical Control of Autonomous Systems -Aaron Ames
中柬联合军演现场:宇树科技四足机器人变身钢铁战士!